Im = 0,714A![]()
Politechnika Lubelska w Lublinie |
Laboratorium Napędu Elektrycznego |
|||||
|
Ćwiczenie numer 19 |
|||||
Imię i nazwisko:
|
Semestr VI |
Grupa 6.2 |
Rok akademicki: 2011/2012 |
|||
Temat ćwiczenia: Regulacja prędkości kątowej indukcyjnego silnika pierścieniowego w podsynchronicznych kaskadach przekształtnikowych. |
Data wykonania: 24.04.2012 |
Ocena: |
||||
Cel ćwiczenia :
Celem ćwiczenia jest zapoznanie się z budową, zasadą pracy oraz charakterystykami układów kaskad podsynchronicznych.
Dane znamionowe :
Silnik pierścieniowy typ SZUe 44b Silnik prądu stałego typ PCMb 54b
Pn =4 kW Pn = 7,5 kW
Un = 380 V Un = 220 V
In = 8,6 A In = 39,2 A
nn = 1425 obr/min nn = 1450 obr/min
Ew = 103 V Im = 0,93 A
Iw = 28 A
cosϕ = 0,82
Prądnica hamownicza typ PZMb 54b Transformator
Pn = 5,5 kw Sn = 6,6 kVA
Un = 220 V U1 = 380 V I1 = 10 A
In = 28,8 A U2 = 127 V I2 = 30 A
nn = 1450 obr/min YyO
Im = 0,714A![]()
Schemat ideowy kaskady przekształtnikowej typu M = const. (ukł. zamknięty) :
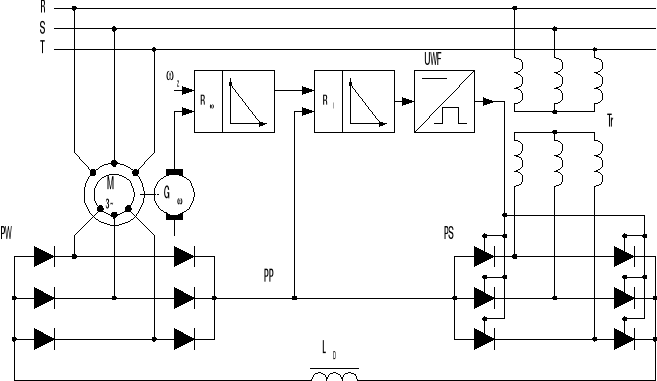
Oznaczenia na schemacie :
PW - prostownik wirnikowy; PS - falownik komutowany siecią;
UWF - układ wyzwalania falownika; R - regulator prędkości;
RI - regulator prądu; PP - przekładnik prądowy;
Tr - transformator dopasowujący; LDŁ - dławik wygładzający.
Charakterystyki mechaniczne kaskady typu M = const. (w układzie otwartym) :
a |
U1 |
I1 |
P1 |
Uw |
Id |
ItH |
|
s |
Po |
EH |
Pw |
M |
|
p |
o |
V |
A |
W |
V |
A |
A |
rad/s |
- |
W |
V |
W |
Nm |
- |
- |
400 |
400 |
5,4 |
50 |
40 |
1 |
0 |
41,87 |
0,73 |
158,98 |
88,8 |
158,98 |
3,80 |
0,31 |
0,01 |
|
400 |
5,6 |
100 |
38 |
2 |
1 |
39,77 |
0,75 |
155,83 |
87,04 |
242,87 |
6,11 |
0,41 |
0,03 |
|
400 |
6 |
100 |
36 |
3 |
2 |
37,68 |
0,76 |
152,69 |
85,28 |
323,25 |
8,58 |
0,31 |
0,02 |
|
400 |
6,2 |
110 |
34 |
4 |
3 |
35,59 |
0,77 |
151,11 |
84,4 |
404,31 |
11,36 |
0,27 |
0,03 |
800 |
400 |
5,5 |
100 |
100 |
1 |
0 |
104,67 |
0,33 |
147,96 |
80,65 |
147,96 |
1,41 |
0,68 |
0,03 |
|
400 |
5,7 |
110 |
110 |
2 |
1 |
115,13 |
0,27 |
144,81 |
79,89 |
224,7 |
1,95 |
0,49 |
0,03 |
|
400 |
6 |
150 |
150 |
3 |
2 |
157,00 |
0 |
140,09 |
78,25 |
296,59 |
1,89 |
0,51 |
0,04 |
|
400 |
6,3 |
200 |
200 |
4 |
3 |
209,33 |
0 |
136,94 |
76,49 |
366,41 |
1,75 |
0,55 |
0,05 |
|
400 |
6,5 |
200 |
200 |
5 |
4 |
209,33 |
0 |
120,36 |
31,65 |
183,27 |
0,88 |
- |
0,04 |
|
400 |
7 |
250 |
250 |
6 |
5 |
261,67 |
0 |
118,33 |
29,89 |
202,97 |
0,78 |
- |
0,05 |
1200 |
400 |
5,6 |
100 |
100 |
2 |
0,5 |
104,67 |
0 |
48,8 |
117,81 |
107,705 |
1,03 |
0,93 |
0,03 |
|
400 |
5,8 |
150 |
150 |
3 |
1 |
157,00 |
0 |
42,5 |
110,35 |
152,85 |
0,97 |
0,98 |
0,04 |
|
400 |
6,1 |
200 |
200 |
3,5 |
2 |
209,33 |
0 |
40,93 |
105,36 |
251,65 |
1,20 |
0,79 |
0,05 |
|
400 |
6,6 |
250 |
250 |
5 |
4 |
261,67 |
0 |
37,78 |
100 |
437,78 |
1,67 |
0,57 |
0,05 |
|
400 |
7,1 |
350 |
350 |
7 |
6 |
366,33 |
0 |
34,53 |
95,68 |
608,61 |
1,66 |
0,58 |
0,07 |
Przykłady obliczeń:
=![]()
=![]()
==41,87 rad/s
s=![]()
=![]()
= 0,73
Pw = PH+P0 = 0 + 158,58 =158,8 W
M.=![]()
=![]()
= 3,8 Nm
=![]()
=![]()
= 0,31
p =![]()
=![]()
=0.01
Charakterystyki mechaniczne kaskady typu M = const. (w układzie zamkniętym )
a |
U1 |
I1 |
P1 |
Uw |
Id |
ItH |
|
s |
Po |
EH |
Pw |
M |
|
p |
o |
V |
A |
W |
V |
A |
A |
rad/s |
- |
W |
V |
W |
Nm |
- |
- |
400 |
400 |
5,4 |
50 |
40 |
1 |
0 |
41,87 |
0,73 |
160,33 |
90,12 |
160,33 |
3,83 |
0,31 |
0,01 |
|
400 |
5,6 |
100 |
40 |
1,5 |
1 |
41,87 |
0,73 |
158,35 |
87,05 |
245,4 |
5,86 |
0,41 |
0,03 |
|
400 |
5,8 |
100 |
40 |
3 |
2 |
41,87 |
0,73 |
156,35 |
86,44 |
329,23 |
7,86 |
0,30 |
0,02 |
|
400 |
6,1 |
120 |
40 |
4 |
3 |
41,87 |
0,73 |
153,28 |
85,66 |
410,26 |
9,80 |
0,29 |
0,03 |
|
400 |
6,3 |
140 |
40 |
5 |
4 |
41,87 |
0,73 |
148,98 |
81,44 |
474,74 |
11,34 |
0,29 |
0,03 |
800 |
400 |
5,5 |
100 |
80 |
1 |
0 |
83,73 |
0,47 |
146,87 |
80 |
146,87 |
1,75 |
0,68 |
0,03 |
|
400 |
5,7 |
110 |
80 |
2 |
1 |
83,73 |
0,47 |
140,09 |
79,22 |
219,31 |
2,62 |
0,50 |
0,03 |
|
400 |
6 |
150 |
80 |
3 |
2 |
83,73 |
0,47 |
138,95 |
77,58 |
294,11 |
3,51 |
0,51 |
0,04 |
|
400 |
6,5 |
200 |
80 |
4 |
3 |
83,73 |
0,47 |
132,33 |
40,77 |
254,64 |
3,04 |
0,79 |
0,04 |
|
400 |
5,8 |
250 |
80 |
5 |
4 |
83,73 |
0,47 |
10,32 |
35,26 |
151,36 |
1,81 |
1,65 |
0,06 |
1200 |
400 |
5,6 |
100 |
120 |
2 |
0 |
125,60 |
0,20 |
50,36 |
115,4 |
50,36 |
0,40 |
1,99 |
0,03 |
|
400 |
6 |
150 |
120 |
3 |
2 |
125,60 |
0,20 |
48,56 |
106,55 |
261,66 |
2,08 |
0,57 |
0,04 |
|
400 |
6,2 |
200 |
120 |
4 |
3 |
125,60 |
0,20 |
46,66 |
103,52 |
357,22 |
2,84 |
0,56 |
0,05 |
|
400 |
6,6 |
300 |
120 |
5 |
4 |
125,60 |
0,20 |
44,52 |
99,33 |
441,84 |
3,52 |
0,68 |
0,07 |
|
400 |
7 |
310 |
120 |
6 |
5 |
125,60 |
0,20 |
40,68 |
90,5 |
493,18 |
3,93 |
0,63 |
0,06 |
Charakterystyki : =f(M);M = f(Id); = f(M); f(M)
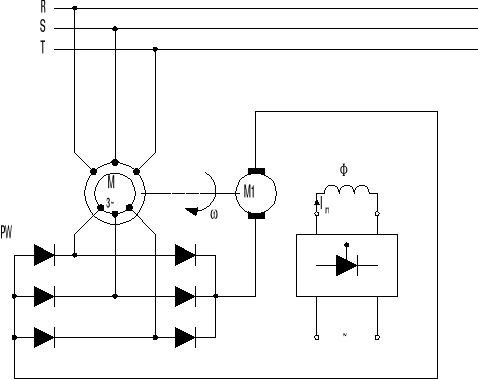
Schemat ideowy kaskady przekształtnikowej typu P = const. (ukł. otwarty) :
Charakterystyki mechaniczne kaskady typu P = const.
Wyniki pomiarów i obliczeń :
a |
U1 |
I1 |
P1 |
Uw |
Id |
ItH |
I |
|
s |
Po |
EH |
Pw |
M |
|
p |
o |
V |
A |
W |
V |
A |
A |
A |
rad/s |
- |
W |
V |
W |
Nm |
- |
- |
400 |
400 |
5 |
100 |
140 |
2 |
0 |
0 |
146,53 |
0,07 |
160,33 |
90,12 |
160,33 |
1,09 |
0,62 |
0,03 |
|
400 |
5 |
150 |
138 |
3 |
1 |
0 |
144,44 |
0,08 |
158,35 |
87,05 |
245,4 |
1,70 |
0,61 |
0,04 |
|
400 |
5 |
200 |
138 |
4 |
2 |
0 |
144,44 |
0,08 |
156,35 |
86,44 |
329,23 |
2,28 |
0,61 |
0,06 |
|
400 |
5 |
250 |
138 |
5 |
3 |
0 |
144,44 |
0,08 |
153,28 |
85,66 |
410,26 |
2,84 |
0,61 |
0,07 |
|
400 |
5 |
300 |
137 |
6 |
4 |
0 |
143,39 |
0,09 |
148,98 |
81,44 |
474,74 |
3,31 |
0,63 |
0,09 |
800 |
400 |
5 |
100 |
108 |
1 |
0,5 |
0,15 |
113,04 |
0,28 |
146,87 |
80 |
186,87 |
1,65 |
0,54 |
0,03 |
|
400 |
5 |
110 |
108 |
2 |
1 |
0,15 |
113,04 |
0,28 |
140,09 |
79,22 |
219,31 |
1,94 |
0,50 |
0,03 |
|
400 |
5 |
150 |
108 |
3 |
2 |
0,15 |
113,04 |
0,28 |
138,95 |
77,58 |
294,11 |
2,60 |
0,51 |
0,04 |
|
400 |
5 |
200 |
108 |
4 |
3 |
0,15 |
113,04 |
0,28 |
132,33 |
40,77 |
254,64 |
2,25 |
0,79 |
0,06 |
|
400 |
5 |
250 |
108 |
5 |
4 |
0,15 |
113,04 |
0,28 |
10,32 |
35,26 |
151,36 |
1,34 |
1,65 |
0,07 |
1200 |
400 |
5 |
50 |
74 |
1 |
0 |
0,55 |
77,45 |
0,51 |
50,36 |
115,4 |
50,36 |
0,65 |
0,99 |
0,01 |
|
400 |
5 |
100 |
74 |
1 |
2 |
0,55 |
77,45 |
0,51 |
48,56 |
106,55 |
261,66 |
3,38 |
0,38 |
0,03 |
|
400 |
5 |
150 |
74 |
2 |
3 |
0,55 |
77,45 |
0,51 |
46,66 |
103,52 |
357,22 |
4,61 |
0,42 |
0,04 |
|
400 |
5 |
150 |
74 |
2 |
4 |
0,55 |
77,45 |
0,51 |
44,52 |
99,33 |
441,84 |
5,70 |
0,34 |
0,04 |
|
400 |
5 |
200 |
74 |
3 |
5 |
0,55 |
77,45 |
0,51 |
40,68 |
90,5 |
493,18 |
6,37 |
0,41 |
0,06 |
Charakterystyki: = f(M); M = f(Id); = f(M); = f(M)
Wnioski:
Prędkość obrotowa kaskad podsynchronicznych zależy od kąta sterowania zaworów prostownika. Zależności te są jednak różne dla obu badanych typów kaskad. Dla kaskady typu M = const. prędkość obrotowa maleje wraz ze wzrostem kąta sterowania, natomiast dla kaskady typu P = const. prędkość obrotowa wzrasta.
W układach kaskady typu M = const. można zaobserwować spadek prędkości obrotowej maszyny wraz ze wzrostem momentu oporowego. Dla wartości małych i średnich momentu spadek prędkości jest proporcjonalny do wzrostu momentu, przy większych wartościach momentu oporowego prędkość spada znacznie gwałtowniej. Przy czym należy zauważyć fakt, że odcinki liniowe charakterystyk dla różnych kątów sterowania są do siebie równoległe, ale odcinek gwałtowniejszego spadku przy większych wartościach momentu jest tym łagodniejszy im większy jest kąt sterowania zaworów. Im większy jest kąt sterowania tym charakterystyka przebiega niżej (mniejsze prędkości obrotowe).
Charakterystyki kaskady typu P = const. są podobne do omówionych wcześniej (co do przebiegu). Z tą jednak różnicą, że kaskada tego typu największe prędkości rozwija dla największego kąta sterowania, jak również dla największego kąta sterowania stromość spadku prędkości dla większych wartości momentu oporowego jest największa.
Błędem popełnionym przez nas podczas wykonywania ćwiczenia jest to, że przy układzie otwartym i zamkniętym nie mieliśmy jednakowych nastaw kąta sterowania. Wpłynęło to na przebieg porównania charakterystyk.