 | Pobierz cały dokument projekt.chwytaka.nr.1.projekty.doc Rozmiar 408 KB |
PROJEKT TECHNICZNY CHWYTAKA
Tomasz Sokołowski
Automatyka i Robotyka
Rok I, Grupa IV
21.06.2007
1. Obliczanie ruchliwości chwytaka na podstawie zadanego schematu.
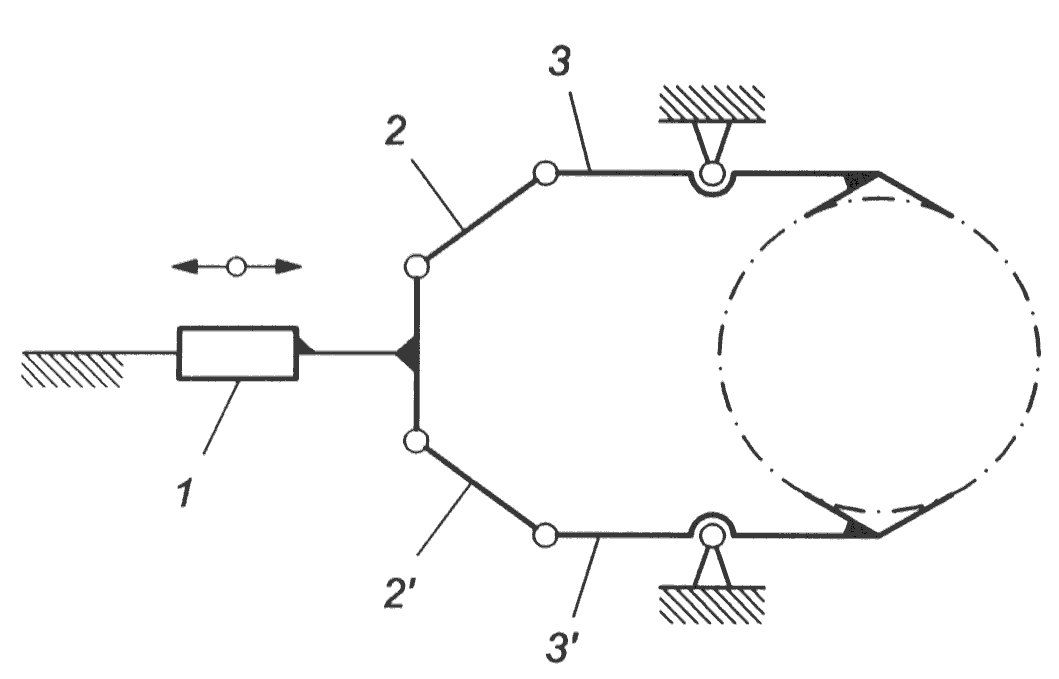
Rys 1. Schemat kinematyczny chwytaka typu P-(O-O-O).
w = 3n - 2p5 - p4 (1)
gdzie: w - ruchliwość chwytaka,
n - liczba członów ruchomych,
p5 - liczba par kinematycznych klasy piątej obrotowych i postępowych,
p4 - liczba par klasy czwartej.
Dla powyższego schematu chwytaka mamy:
n = 5
p5 = (0,1),(1,2),(1,2'),(2,3),(2' ,3'),(3,0),(3' ,0) = 7
p4 = 0
w = 3·5 - 2·7 - 2·0 = 1
2. Analiza zadania projektowego.
Przyjęcie podstawowych wymiarów elementów chwytaka. Wyznaczenie skoku siłownika oraz rozwarcia szczęk.
Schemat kinematyczny chwytaka w podziałce 1:1 jest widoczny na dołączonym rysunku.
Podstawowe wymiary chwytaka:
l11 = 20 mm
l12 = 10 mm
l2 = 46 mm
l3 = 120 mm
l31 = 60 mm
l32 = 60 mm
l4 = 45 mm
l0 = 120 mm
Skok siłownika:
Δx = 10 mm
Minimalne i maksymalne rozwarcie szczęk chwytaka:
2ymin = 80 mm
2ymax = 114 mm
Minimalna i maksymalna średnica obiektu przenoszonego:
dmin = 70 mm
dmax = 100 mm
Obliczenie maksymalnego ciężaru obiektu transportowanego:
![]()
gdzie:
dmax [m] - maksymalna średnica obiektu chwytanego
lmax [m] - maksymalna długość obiektu chwytanego
γ [N/m3] - ciężar właściwy przenoszonego obiektu
γbrązu = 76596 [N/m3] lmax = 0,15 [m] dmax = 0,1 [m]
Qmax = 90,2 [N]
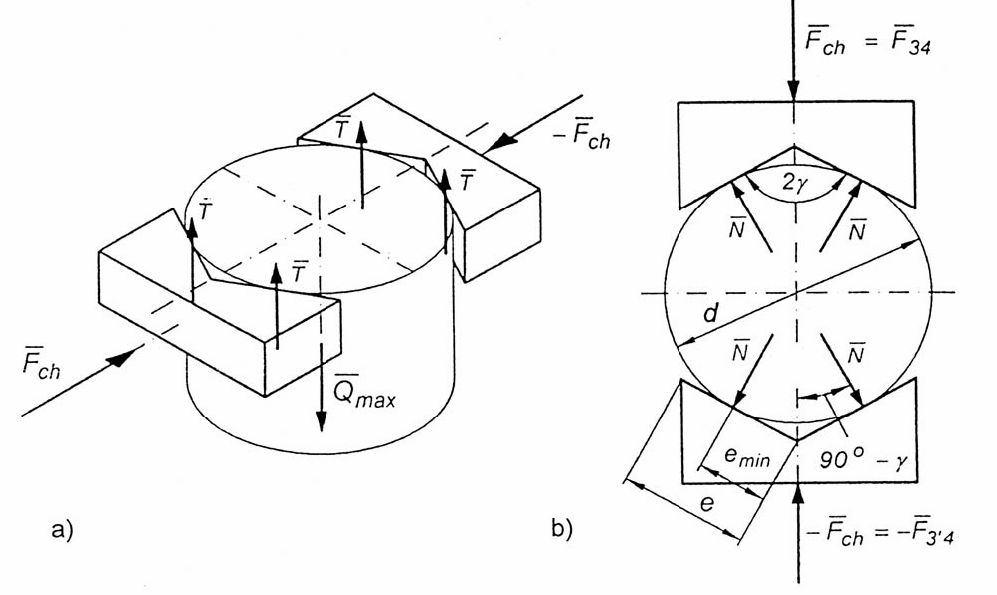
Wyznaczenie maksymalnej koniecznej siły chwytu Fch max:
Dane: Qmax = 90,2 [N]0
μ = 0,18 - współczynnik tarcia pomiędzy szczękami(stal), a obiektem(brąz)
n = 2 - współczynnik przeciążenia chwytaka
2γ = 120o - kat nachylenia szczęk chwytaka
 | Pobierz cały dokument projekt.chwytaka.nr.1.projekty.doc rozmiar 408 KB |