Politechnika Radomska Wydział Transportu |
LABOLATORIUM MASZYN ELEKTRYCZNYCH |
Data:
|
|||
|
Grupa:
|
Zespół:
|
Rok akademicki:
|
||
Nr cwiczenia: 2 |
BADANIE SILNIKA KLATKOWEGO |
Ocena: |
|||
Dane znamionowe silnika:
Pn=4kW, Un(⋏/Δ)=660/380V, In(⋏/Δ)=5,03/8,7A, n=1435obr/min, cosϕ=0,84,
Rf=3Ω
Próba biegu jałowego
a) Schemat połączeń do próby biegu jałowego silnika klatkowego.
b) Tabela pomiarowa.
Pomiary |
||||||||
L.p. |
|
|
|
|
|
|
|
|
|
V |
V |
V |
A |
A |
A |
W |
W |
1. |
380 |
380 |
380 |
3,25 |
3,4 |
3,35 |
760 |
-480 |
2. |
320 |
320 |
320 |
2,3 |
2,4 |
2,4 |
460 |
-220 |
3. |
280 |
280 |
280 |
1,9 |
2 |
2 |
340 |
-140 |
4. |
240 |
240 |
240 |
1,55 |
1,6 |
1,6 |
240 |
-60 |
5. |
200 |
200 |
200 |
1,25 |
1,3 |
1,2 |
170 |
-50 |
6. |
160 |
160 |
160 |
1 |
1 |
1 |
120 |
-35 |
7. |
120 |
120 |
120 |
0,6 |
0,6 |
0,6 |
70 |
-5 |
8. |
80 |
80 |
80 |
0,5 |
0,5 |
0,5 |
50 |
15 |
Obliczenia |
||||||||
|
|
|
|
|
|
|
|
|
V |
A |
W |
- |
- |
A |
A |
W |
W |
380 |
3,33 |
280 |
0,12 |
0,99 |
0,4 |
3,29 |
99,8 |
180,2 |
320 |
2,36 |
240 |
0,18 |
0,98 |
0,42 |
2,31 |
50,1 |
189,9 |
280 |
1,96 |
200 |
0,21 |
0,97 |
0,41 |
1,9 |
34,6 |
165,4 |
240 |
1,58 |
180 |
0,27 |
0,96 |
0,42 |
1,51 |
22,4 |
157,6 |
200 |
1,25 |
120 |
0,28 |
0,96 |
0,35 |
1,2 |
14 |
106 |
160 |
1 |
85 |
0,31 |
0,95 |
0,31 |
0,95 |
9 |
76 |
120 |
0,6 |
65 |
0,52 |
0,85 |
0,31 |
0,51 |
3,24 |
61,7 |
80 |
0,5 |
65 |
0,93 |
0,36 |
0,43 |
0,18 |
2,25 |
62,75 |
c) wzory oraz przykładowe obliczenia
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
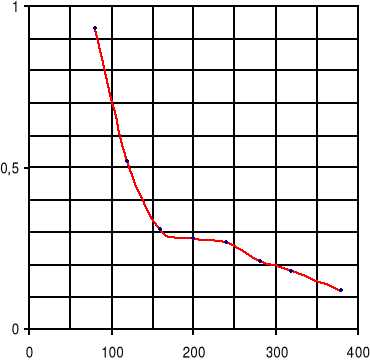
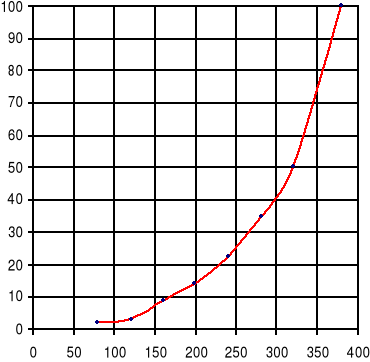
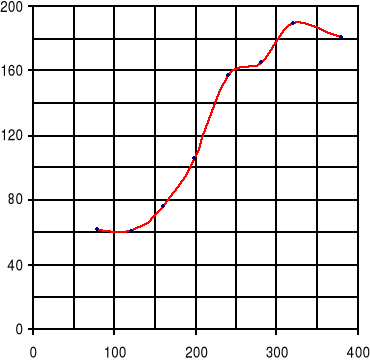
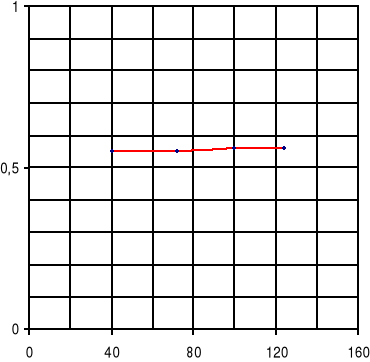
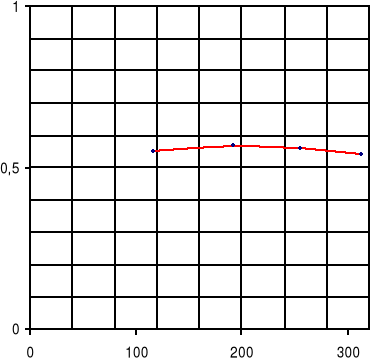
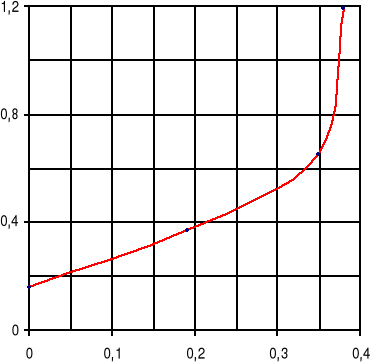
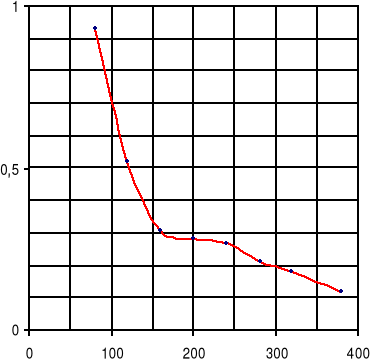
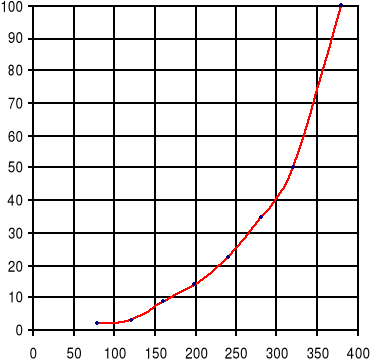
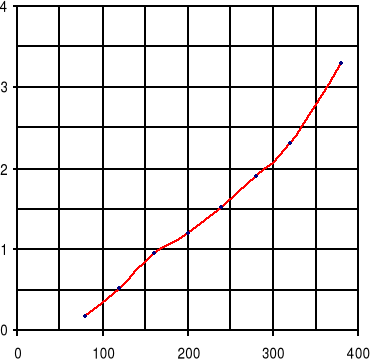
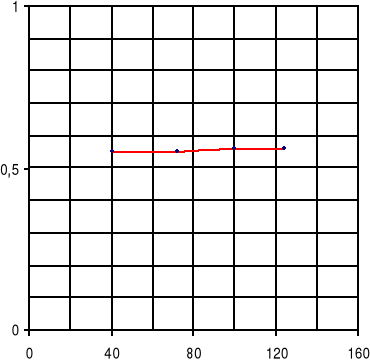
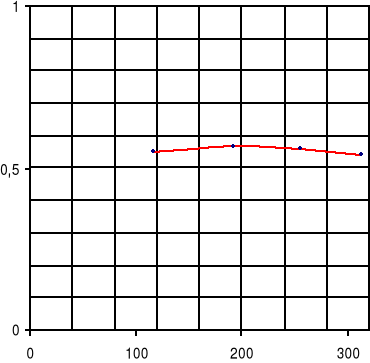
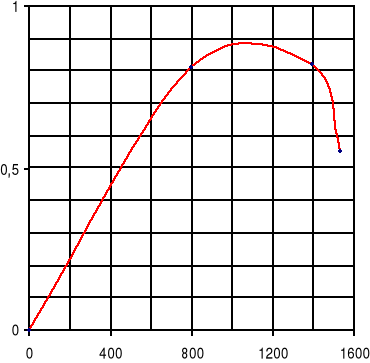
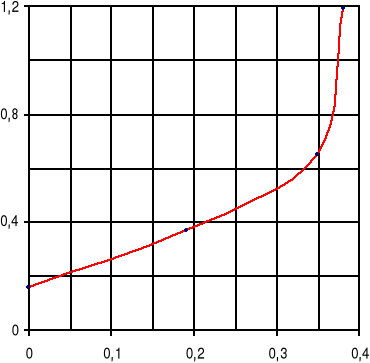
d) Charakterystyki biegu jałowego
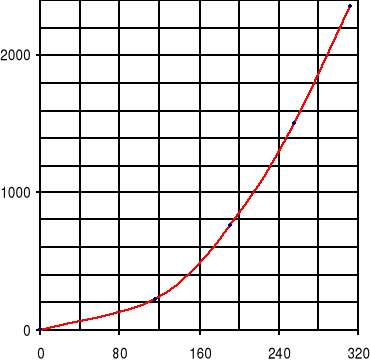
Próba zwarcia
a) Schemat połączeń do badań silnika indukcyjnego.
b) Tabela pomiarowa.
|
Pomiary
|
Obliczenia |
||||||||||||
L.p. |
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
V |
V |
V |
A |
A |
A |
W |
W |
kG |
V |
A |
W |
- |
Nm |
1. |
116 |
116 |
116 |
1,95 |
2 |
2 |
155 |
65 |
0,8 |
116 |
1,98 |
220 |
0,55 |
7,84 |
2. |
192 |
192 |
192 |
3,9 |
4 |
4 |
540 |
220 |
1,25 |
192 |
3,96 |
760 |
0,57 |
12,3 |
3. |
256 |
256 |
256 |
5,9 |
6 |
6 |
1100 |
400 |
2 |
256 |
5,96 |
1500 |
0,56 |
19,6 |
4. |
312 |
312 |
312 |
7,9 |
8 |
8 |
1820 |
540 |
3,25 |
312 |
7,96 |
2360 |
0,54 |
31,9 |
5. |
40 |
40 |
40 |
1,9 |
2 |
2 |
55 |
20 |
0,6 |
40 |
1,96 |
75 |
0,55 |
5,88 |
6. |
72 |
72 |
72 |
3,9 |
4 |
4 |
195 |
80 |
0,75 |
72 |
3,96 |
275 |
0,55 |
7,35 |
7. |
100 |
100 |
100 |
5,9 |
6 |
6 |
415 |
165 |
1 |
100 |
5,96 |
580 |
0,56 |
9,81 |
8. |
124 |
124 |
124 |
7,8 |
8 |
8 |
690 |
262 |
1,5 |
124 |
7,93 |
952 |
0,56 |
14,7 |
Skojarzenie uzwojeń: 1...4 - gwiazda; 5...8 - trójkąt.
c) Wzory i przykładowe obliczenia.
![]()
![]()
![]()

![]()
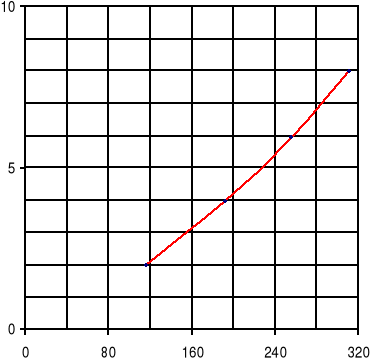
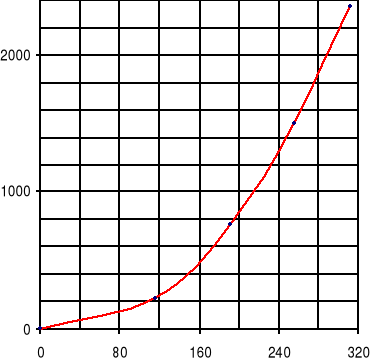
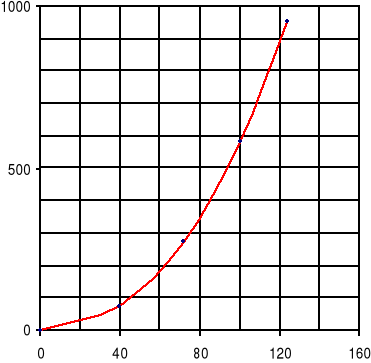
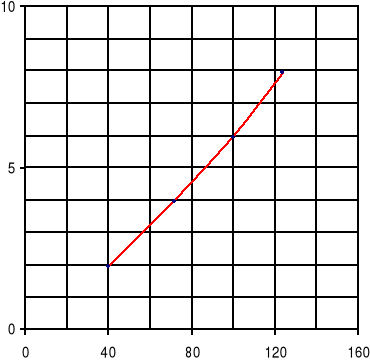
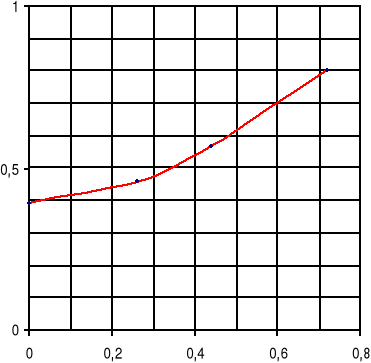
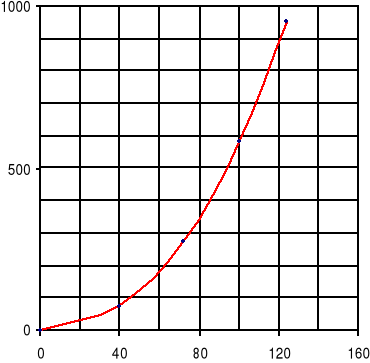
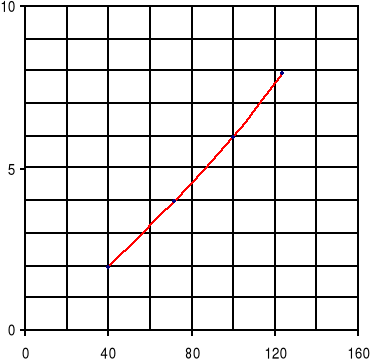
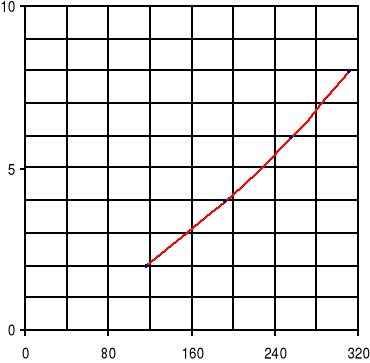
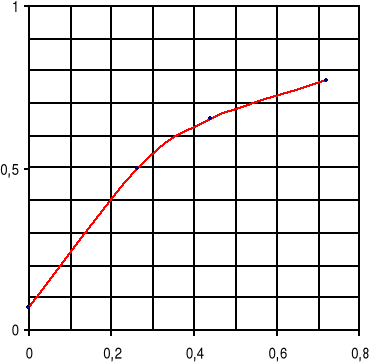
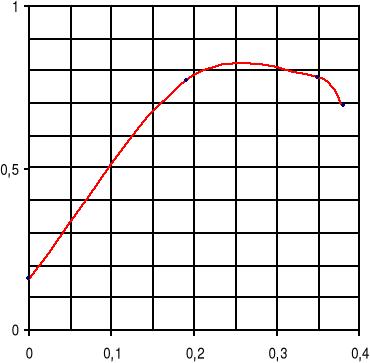
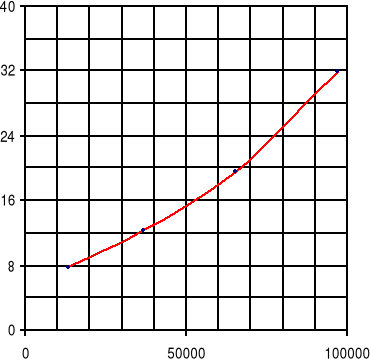
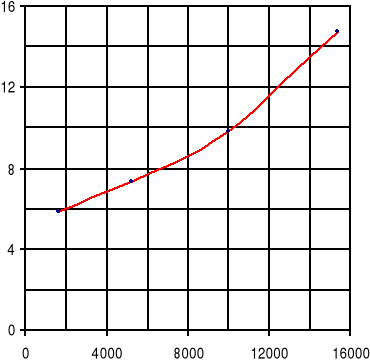
d) Charakterystyki stanu zwarcia silnika klatkowego.
dla trójkąta dla gwiazdy
4. Próba obciążenia silnika klatkowego.
a) Tabela pomiarowa.
|
Pomiary
|
Obliczenia |
|||||||||||||
L.p. |
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
η |
|
V |
A |
W |
W |
kG |
kG |
obr/min |
W |
W |
kG |
Nm |
- |
- |
- |
- |
1. |
380 |
0,8 |
205 |
-120 |
0 |
0 |
1420 |
85 |
0 |
0 |
0 |
0,16 |
0,16 |
0 |
0 |
2. |
380 |
1,9 |
700 |
275 |
4 |
8,25 |
1400 |
975 |
796 |
4,25 |
5,42 |
0,77 |
0,37 |
0,19 |
0,81 |
3. |
380 |
3,3 |
1160 |
540 |
6 |
13,5 |
1390 |
1700 |
1395 |
7,5 |
9,56 |
0,78 |
0,65 |
0,35 |
0,82 |
4. |
380 |
6 |
2040 |
700 |
8,5 |
19 |
1350 |
2740 |
1531 |
8,5 |
10,8 |
0,69 |
1,19 |
0,38 |
0,55 |
5. |
380 |
3,4 |
790 |
-620 |
0 |
0 |
1450 |
170 |
0 |
0 |
0 |
0,07 |
0,39 |
0 |
0 |
6. |
380 |
4 |
1360 |
-25 |
5 |
10,5 |
1420 |
1335 |
1043 |
5,5 |
7 |
0,5 |
0,46 |
0,26 |
0,78 |
7. |
380 |
5 |
1800 |
360 |
7 |
16,5 |
1400 |
2160 |
1778 |
9,5 |
12,1 |
0,65 |
0,57 |
0,44 |
0,82 |
8. |
380 |
7 |
2640 |
940 |
11 |
26,5 |
1400 |
3580 |
2895 |
15,5 |
19,7 |
0,77 |
0,8 |
0,72 |
0,8 |
b) Wzory oraz przykładowe obliczenia.
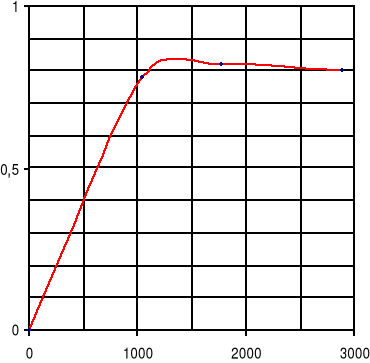
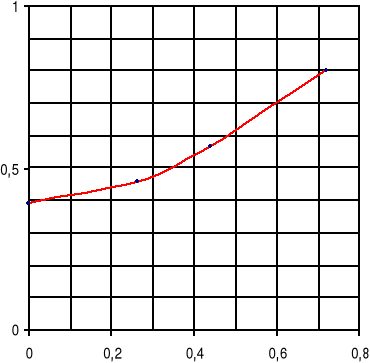
c) Charakterystyki stanu obciążenia
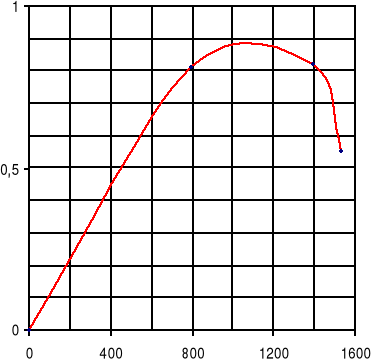
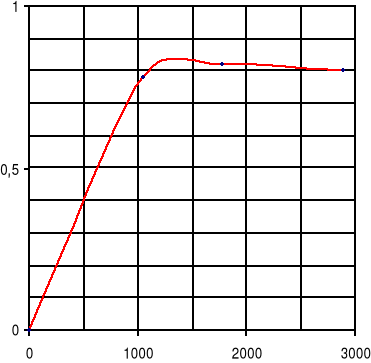
dla gwiazdy dla trójkąta
Wyznaczenie początkowego momentu rozruchowego
dla gwiazdy dla trójkąta
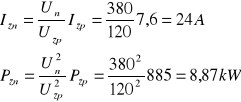
Obliczenie prądu zwarcia i mocy zwarcia przy Un
dla gwiazdy
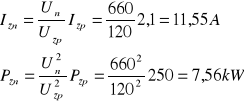
dla trójkąta
Obliczenie stosunku prądów gwiazdy i trójkąta
![]()
Obliczenie wartości rozruchowego momentu początkowego przy Un
dla gwiazdy
dla trójkąta

Obliczenie krotności rozruchowego momentu początkowego
dla gwiazdy
![]()
dla trójkąta
![]()
WNIOSKI
Przedmiotem naszych badań był silnik indukcyjny klatkowy. Badanie silnika przeprowadziliśmy w trze stanach: jałowym, zwarcia i obciążenia.
Próba stanu jałowego służy do określenia strat jałowych i rozdzielić je na straty mechaniczne oraz straty w rdzeniu. Moc strat w uzwojeniu jest bardzo mała i w naszych pomiarach nie przekroczyła 1W. Wraz ze wzrostem napięcia rośnie prąd i moc natomiast cosϕo maleje. Współczynnik mocy cosϕo oraz wartość czynna prądu Iow są bardzo małe natomiast wartość bierna Iu prądu I10-biegu jałowego jest duża. Oznacz to, że silnik ten pobiera w stanie jałowym ( gdy jest nieobciążony) znaczną moc bierną co jest zjawiskiem niekorzystnym.
W przypadku zwarcia silnika (wirnik zablokowany) prąd zwarcia Iz ma przebieg prostoliniowy -narasta wraz ze wzrostem napięcia. Współczynnik mocy cosϕz ma w przybliżeniu wartość stałą. Natomiast moc pobierana z sieci Pz -przetwarzana jest prawie w całości na ciepło ponieważ strat mechanicznych nie ma (Pm=Mn=o bo n=0), natomiast straty w stali są stosunkowo małe. Moc jaką pobiera silnik przy prądzie znamionowym można uznać za straty obciążeniowe. Zwarcie silnika jest stanem bardzo często spotykanym -każdy rozruch silnika jest zwarciem, ponieważ w pierwszym momencie n=0. Co można było zaobserwować na miernikach (prądu), które przy każdorazowym włączeniu silnika wychylały się do wartości przekraczających wartości znamionowe. W silnikach indukcyjnych prąd rozruchu przewyższa prąd znamionowy w związku z tym silniki o dużej mocy nie mogą być włączane bezpośrednio do sieci.
Na podstawie otrzymanej charakterystyki M=f(n) można stwierdzić, że jego moment rozruchowy jest duży może być zastosowany np. do urządzeń młynarskich. W raz ze wzrostem obciążenia narasta współczynnik mocy cosϕ i jego największa wartość jest blisko obciążenia znamionowego. Wynika z tego, że silnik ten nie powinien pracować z zapasem mocy.
1
cosϕ
U0[V]
I0W
U0[V]
ΔPU[W]
I0μ
U0[V]
Uo [V]
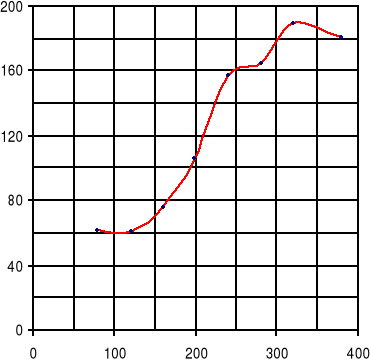
ΔP0[W]
U0[V]
cosϕ
cosϕ
UZ[V]
UZ[V]
UZ[V]
UZ[V]
UZ[V]
UZ[V]
PZ[W]
PZ[W]
IZ[A]
IZ[A]
![]()
![]()
![]()
![]()
![]()
![]()
cosϕ
cosϕ
Uz2
η
η
P2
P2
Uz2
Mr
Mr
Uo [V]