img152

152
10. Metody ciągowe
produkcje tp generujące obrazy III oraz IV: (1) oraz
(6) Si - 42 S5 (8) S6 - 31 S7,
(7) S5 - 23S6 (9) S7 — $,
£/v = {5, Si}, i = 1,..., 7,
£r = {$,14,43,32,21,42,23,31}.
Natomiast automat 21 jest skonstruowany w następujący sposób: 21 = M,Q,6,q,F),
T.'t = {$, 14,43,32,21,42,23,31},
Q = {S,Si}, i — 1,.... 7,
9o = S,
F= {A,£,err},
gdzie klasa A zawiera obrazy I i II, klasa B - obrazy III i IV; ć(S,14)=Si, ó(Si,42) = S5,
6(Slt43) = S2, ć(S5,23) = S6,
«(S3,21) = S4, ó(S7,$) = B.
ó(S4,$) = A,
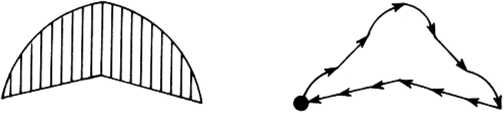
Rys. 10.8. Obiekt do rozpoznawania (po lewej) i jego opis (po prawej)
Dokonajmy rozpoznania obrazu V znajdującego się na rysunku 10.8, różnego od wcześniej rozważanych obrazów:
Des(V) = S7i S31 S7j S74S34S74-S32 532^32 S33S33S33 Zdefiniujmy konfigurację łransdjusera jako trójkę:
(aktualny stan, wejście, wyjście).
|
(91, |
S7lS3]S7]S74S34S74S32S32S32S33S33S33> A | |
|
1— |
(91. |
*31*71*74S34*74«32«32S32S33*33*33, A |
|
1— |
(91. |
S71S74S34*74*32S32S32S33*33«33i A |
|
1— |
(91. |
S74S34S74*32*32*32S33«33*33, A |
Przetwarzanie Des(V) będzie przebiegać następująco:
liii
Wyszukiwarka
Podobne podstrony:
img138 138 10. Metody ciągowe iP4: produkcje generujące D: (1), (2), (3), (4), (6), (7), (8) oraz(15
img135 10. METODY CIĄGOWE10.1. Uwagi ogólne W tym rozdziale omówimy trzy spośrod wielu znanych metod
img136 136 10. Metody ciągowe W kolejnych podrozdziałach przedstawimy te metody, prezentując: mechan
img140 140 10. Metody ciągowe repeat getchar(ch); State := transfunc(state, ch) until State in final
img142 142 10. Metody ciągowe b) a ac)d)e) c (6 + c) * a a Rys. 10.3. Zbiór składowych pierwotnych i
img144 144 10. Metody ciągowe (3) dla każdego nieterminala A 6 Ew i terminala a €
img146 146 10. Metody ciągowe list - lista tworzona w czasie rozpoznawania, w której pamiętane są ko
img148 148 10. Metody ciągowe Rys. 10.4. Zbiór obiektów podlegających opisowi w języku
img150 150 10. Metody ciągowe Rys. 10.6. Opis obiektów z rys. 10.4 za pomocą składowych z rys. 10.5
img154 154 10. Metody ciągowe procedurę RecJakubowski; begin actsiną := givesinquad(bufin); firstsin
więcej podobnych podstron