Zdjecie1089
- możliwość przyłączenia i współpracy z przekładnią dodatkową odbioru mocy
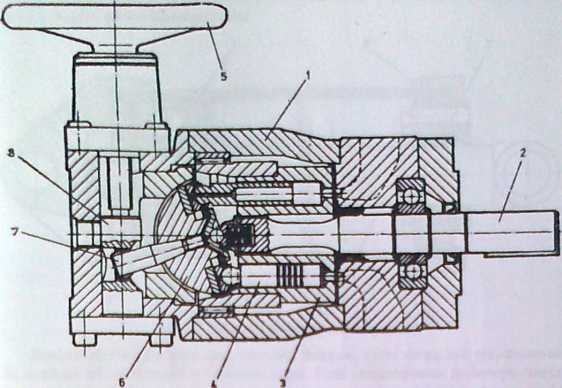
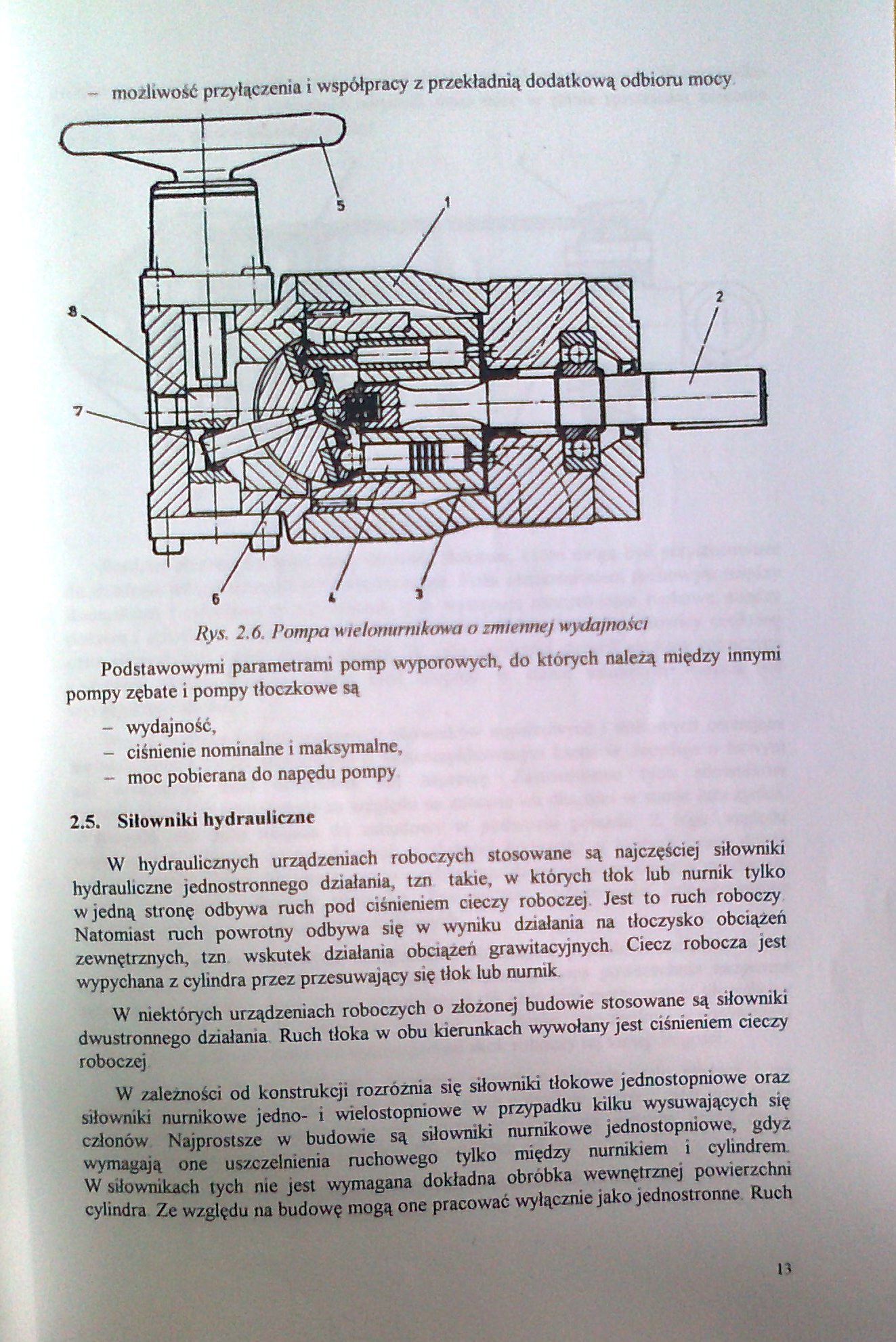
Rys. 2.6. Pompa wielomimikawa o zmiennej wydajności
Podstawowymi parametrami pomp wyporowych, do których należą między innymi pompy zębate i pompy tłoczkowe są
- wydajność,
- ciśnienie nominalne i maksymalne,
- moc pobierana do napędu pompy
2,5. Siłowniki hydrauliczne
W hydraulicznych urządzeniach roboczych stosowane są najczęściej siłowniki hydrauliczne jednostronnego działania, tzn takie, w których tłok lub nurnik tylko w jedną stronę odbywa ruch pod ciśnieniem cieczy roboczej. Jest to ruch roboczy Natomiast nich powrotny odbywa się w wyniku działania na tłoczysko obciążeń zewnętrznych, tzn. wskutek działania obciążeń grawitacyjnych. Ciecz robocza jest wypychana z cylindra przez przesuwający się tłok lub nurnik
W niektórych urządzeniach roboczych o złożonej budowie stosowane są siłowniki dwustronnego działania. Ruch tłoka w obu kierunkach wywołany jest ciśnieniem cieczy roboczej.
W zależności od konstrukcji rozróżnia się siłowniki tłokowe jednostopniowe oraz siłowniki nurnikowe jedno- i wielostopniowe w przypadku kilku wysuwających się członów Najprostsze w budowie są siłowniki nurnikowe jednostopniowe, gdyż wymagają one uszczelnienia ruchowego tylko między nurnikiem i cylindrem. W siłownikach tych nie jest wymagana dokładna obróbka wewnętrznej powierzchni cylindra Ze względu na budowę mogą one pracować wyłącznie jako jednostronne. Ruch
13
Wyszukiwarka
Podobne podstrony:
IMG 66 (2) Ry». 7.1. Warunki współpracy silników z odbiornikami mocy o różnym przeznuczeniu: a) na c
3 Rys.l. Warunki współpracy silników z odbiornikami mocy o różnym przeznaczeniu: a) na charakterysty
Zdjęcie1238 Kielce, dma21 MMn1 ^g( i —------------ m Moc saczyicmm odbiornika energii cktaryc«q jc«
Zdjęcie2489 Choroby jamy lWłntłbr/usa^j dodatkowe •
powierzchni badanej. Jest to możliwe i to bez powstania dodatkowego dużego błędu. Należy w tym celu
Politechnika Szczecińska - Instytut Elektrotechniki Studium możliwości przyłączania elektrowni
więcej podobnych podstron