Zdjęcie222
TEMAT 19
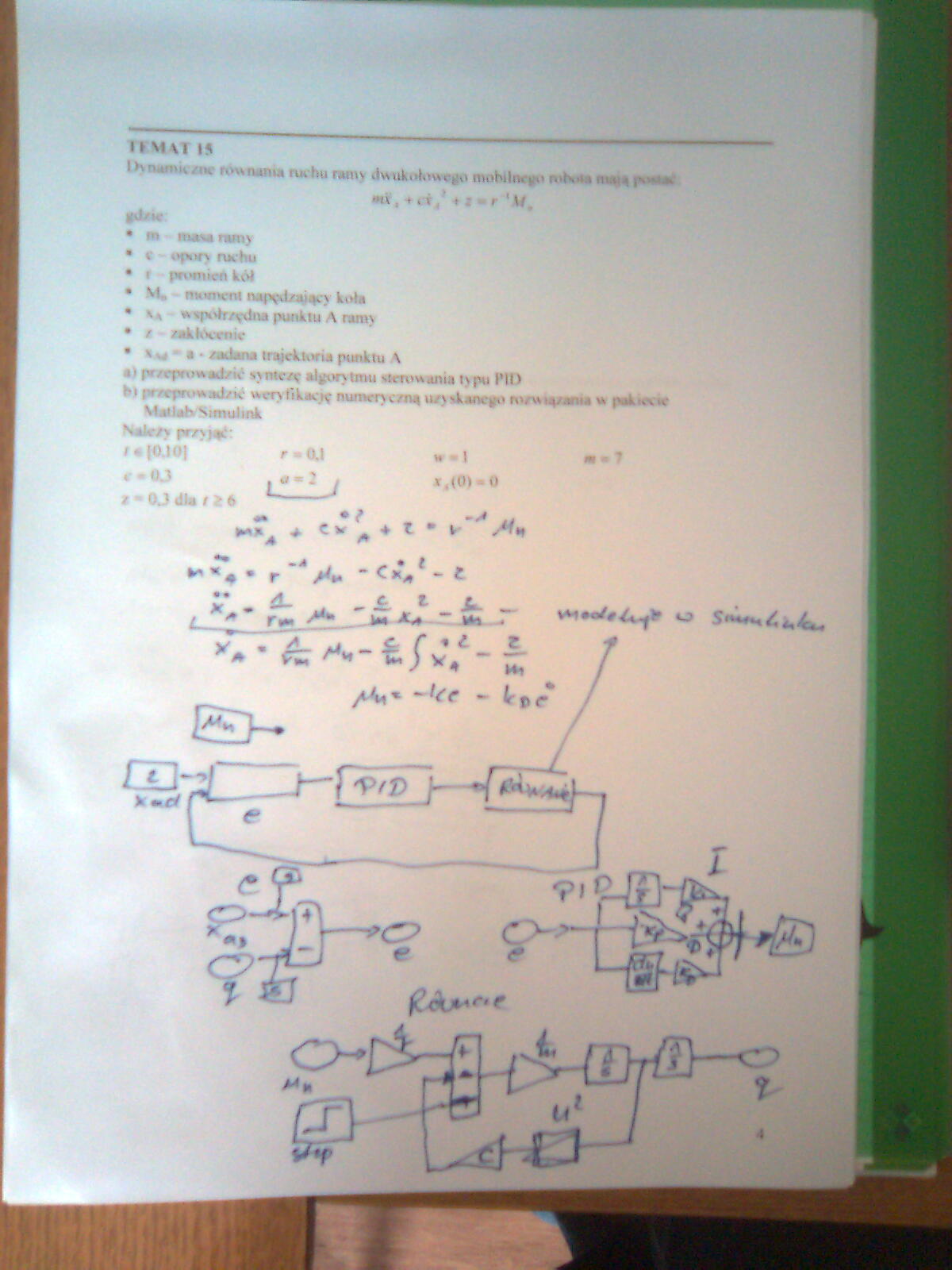
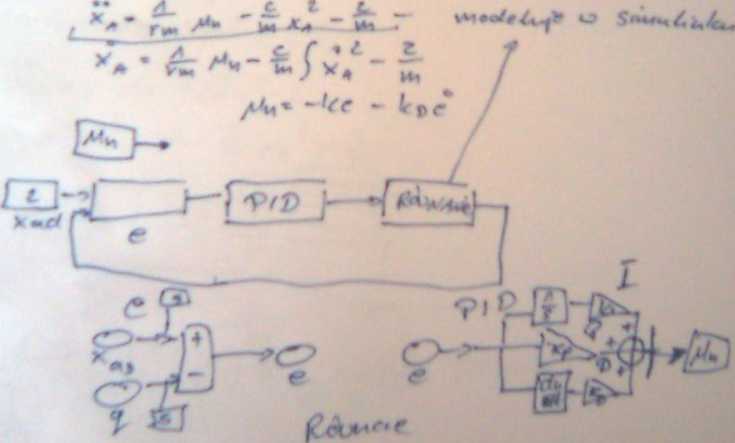
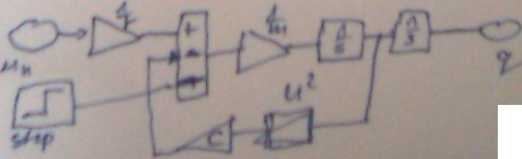
L>va«mH4nr rownunia ruchu rwm dwukołowego mobilnego wKu.i uti«H paM
•w.łii, * : ■ r 1M.
gd/ie
• M IB— IM)
• c opon ruchu
• « pcoimort kół
• M, momcni napędxąncy koła
• współrzędna punktu A ramy
• t Mktóunir
• \ w * • • —dana trajektoria punktu A
• l pr/cpnmad/m »>mc/v algorytmu sterowania typu Pll>
hl pr/irpnokad/ic weryfikację numeryczną ur)duc|i) rn/w t^/ania w pakiecie Matlah SimuJink Nałc/y przyjąć:
I • (0.10] r - 0,1 w ■ ł «« 7
c -03 j««2 j *4(0t«0
• - 03 dla c 2 6 *--J
►uT^ + Z* * ♦ * • ^
.a . .- • I ,
m«#* r A c*/» • Ł
4
Wyszukiwarka
Podobne podstrony:
Zdjęcie 0064 i 5. Czerwona plama Cmi. Pokazanie ruchu czerwonej plamy na Materiały: cztero litrowy s
Zdjęcie0172 (2) j" ~ r~ pf° tWH)• f»Aoć o^&[mh y*
Zdj?cie0423 (2) TEMAT MONOLITYCZNY STROP PŁYTOWO - ŻEBROWY W BUDYNKU WIELOKONDYGNACYJNYM 0 KONS
Zdjęcie596 (2) f S v/ 18) 19) 20) / s/ v/ v/*“ y road. The man responsible for the road works will
więcej podobnych podstron