1tom201

Automatyka i robotyka
prof. dr hab. inż. Roman Górecki dr inż. Andrzej J. Marusak
8.1. Sterowanie, regulacja automatyczna
8.1.1. Proces technologiczny a obiekt regulacji
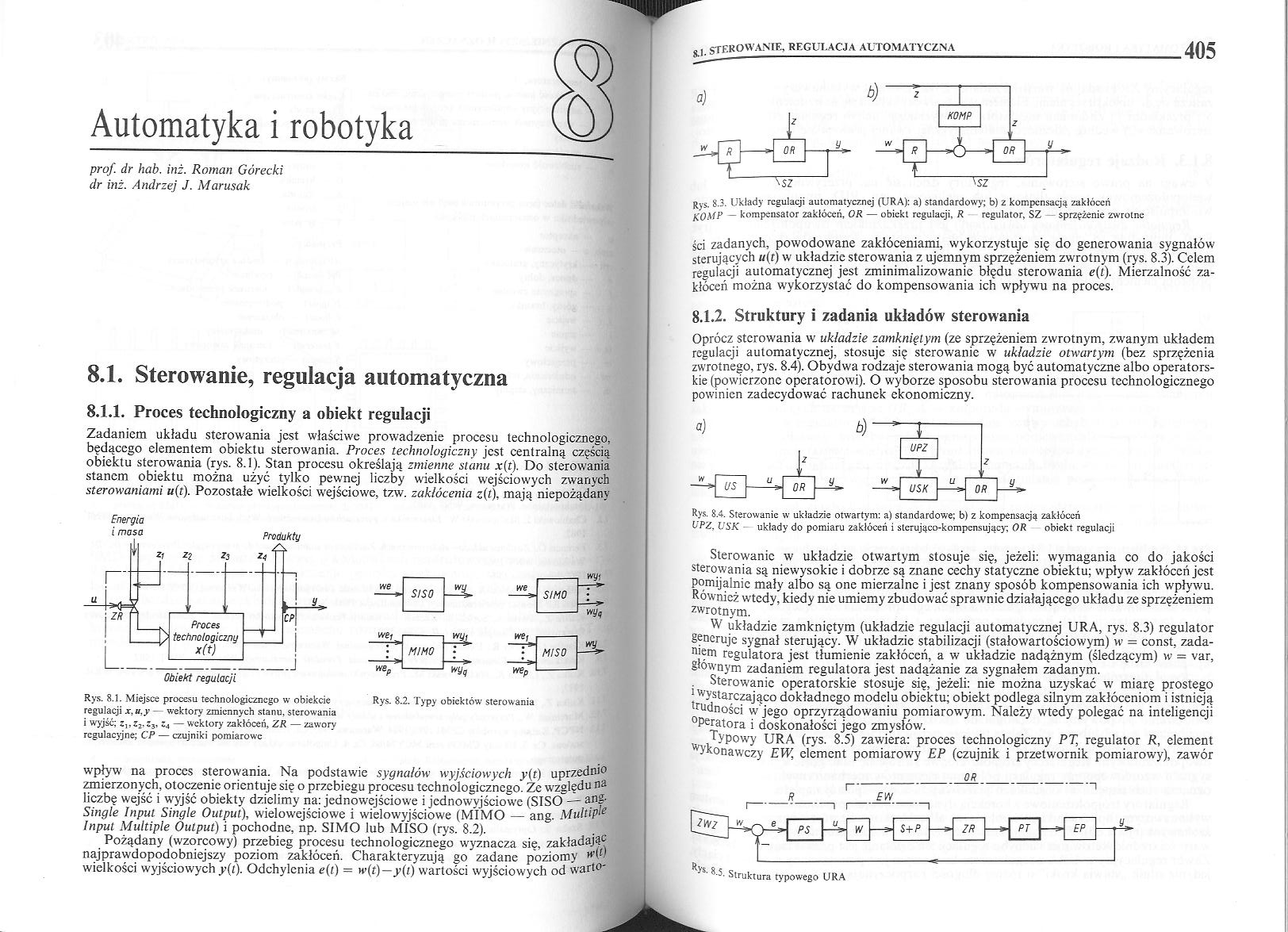
Zadaniem układu sterowania jest właściwe prowadzenie procesu technologicznego, będącego elementem obiektu sterowania. Proces technologiczny jest centralną częścią obiektu sterowania (rys. 8.1). Stan procesu określają zmienne stanu x(t). Do sterowania stanem obiektu można użyć tylko pewnej liczby wielkości wejściowych zwanych sterowaniami u(t). Pozostałe wielkości wejściowe, tzw. zakłócenia z(l), mają niepożądany
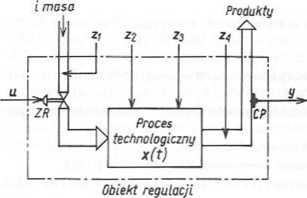
Rys. 8.1. Miejsce procesu technologicznego w obiekcie Rys. 8.2. Typy obiektów sterowania
regulacji x, u,y - wektory zmiennych stanu, sterowania i wyjść; z,,z2.z3, z4 — wektory zakłóceń, ZR — zawory regulacyjne; CP — czujniki pomiarowe
wpływ’ na proces sterowania. Na podstawie sygnałów wyjściowych y(t) uprzednio zmierzonych, otoczenie orientuje się o przebiegu procesu technologicznego. Ze względu na liczbę wejść i wyjść obiekty dzielimy na: jednowcjściowe i jednowyjściowe (SISO — ani?-Single Inpul Single Output), wielow'ejściowe i wielowyjściowe (MIMO — ang. MultiP‘e łnput Multiple Óulput) i pochodne, np. SIMO lub MISO (rys. 8.2).
Pożądany (wzorcowy) przebieg procesu technologicznego wyznacza się, zakładaj?0 najprawdopodobniejszy poziom zakłóceń. Charakteryzują go zadane poziomy wielkości wyjściowych >’((). Odchylenia e(l) = »’(t)—>’(0 wartości wyjściowych od warto-
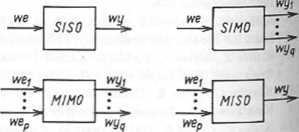
Rys. 8.3. Układy regulacji automatycznej (URA): a) standardowy; b) z kompensacją zakłóceń KOMR - kompensator zakłóceń, OR — obiekt regulacji, R regulator, SZ sprzężenie zwrotne
ści zadanych, powodowane zakłóceniami, wykorzystuje się do generowania sygnałów sterujących u(t) w układzie sterowania z ujemnym sprzężeniem zwrotnym (rys. 8.3). Celem regulacji automatycznej jest zminimalizowanie błędu sterowania e(t). Mierzalność zakłóceń można wykorzystać do kompensowania ich wpływu na proces.
8.1.2. Struktury i zadania układów sterowania
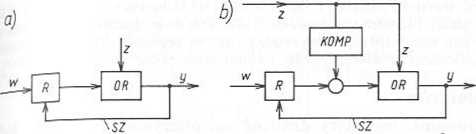
Oprócz sterowania w układzie zamkniętym (ze sprzężeniem zwrotnym, zwanym układem regulacji automatycznej, stosuje się sterowanie w układzie otwartym (bez sprzężenia zwrotnego, rys. 8.4). Obydwa rodzaje sterowania mogą być automatyczne albo operatorskie (powierzone operatorowi). O wyborze sposobu sterowania procesu technologicznego powinien zadecydować rachunek ekonomiczny.
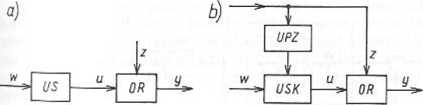
Rys. 8.4. Sterowanie w układzie otwartym: a) standardowe; b) z kompensacją zakłóceń UPZ, USK układy do pomiaru zakłóceń i slerująco-kompcnsujący; OR obiekt regulacji
Sterowanie w układzie otwartym stosuje się, jeżeli: wymagania co do jakości sterowania są niewysokie i dobrze są znane cechy statyczne obiektu; wpływ zakłóceń jest pomijalnic mały albo są one mierzalne i jest znany sposób kompensowania ich wpływu. Również wtedy, kiedy nie umiemy zbudować sprawnie działającego układu ze sprzężeniem
zwrotnym.
W układzie zamkniętym (układzie regulacji automatycznej URA, rys. 8.3) regulator generuje sygnał sterujący. W układzie stabilizacji (stałowartościowym) w = const, zadaniem regulatora jest tłumienie zakłóceń, a w układzie nadążnym (śledzącym) w = var, głównym zadaniem regulatora jest nadążanie za sygnałem zadanym.
Sterowanie operatorskie stosuje się, jeżeli: nie można uzyskać w miarę prostego i wystarczająco dokładnego modelu obiektu; obiekt podlega silnym zakłóceniom i istnieją nudności w jego oprzyrządowaniu pomiarowym. Należy wtedy polegać na inteligencji °Peratora i doskonałości jego zmysłów.
Typowy URA (rys. 8.5) zawiera: proces technologiczny PT, regulator R, element ykonawczy EW, element pomiarowy EP (czujnik i przetwornik pomiarowy), zawór

R-5, Struktura typowego URA
Wyszukiwarka
Podobne podstrony:
Automatyka i Robotyka - Semestr VIII3. Ochrona danych Wykładowca: prof. dr hab. inż. Andrzej Bartosz
Katedra Systemów Automatyki Kierownik: prof. dr hab. inż. Maciej Niedźwiecki, prof
KatedraSystemów Automatyki Kierownik: prof. dr hab. inż. Maciej Niedźwiecki Telefo
8.00-9.30 9.40-11.10 Podstawy automatyki - wykład prof.dr hab.inż. Andrzej
Wspomnienieo prof. dr. hab. inż. Andrzeju Radwanie (1944-2012) Z żalem i wielkim smutkiem 16 styczni
- prof. dr hab. inż Andrzej Filistowicz - dr Robert Karczmarczyk
WŁADZEWYDZIAŁU TOWAROZNAWSTWA dr hab. Inż. Andrzej Chochoł, prof AE dziekan Wydziału Towaroznawstwa
OFERTA DLA KANDYDATÓW dr hab. inż. Andrzej Brykalski, prof. nadzw. PS dr inż. Stefan Domek dr inż. B
dr hab. inż. Andrzej GONTARZ, prof. PL dr hab. inż. Anna HALICKA, prof. PL dr hab. Wiesław JANIK, pr
Wydano za zgodą Rektora Opiniodawca prof. dr hab. inż. Andrzej BYLICA Skrypt opracował zespół w
Osoba odpowiedzialna za przedmiot: Prof. dr hab. inż. Andrzej Barański Jednostka
więcej podobnych podstron