CCF20120606�001
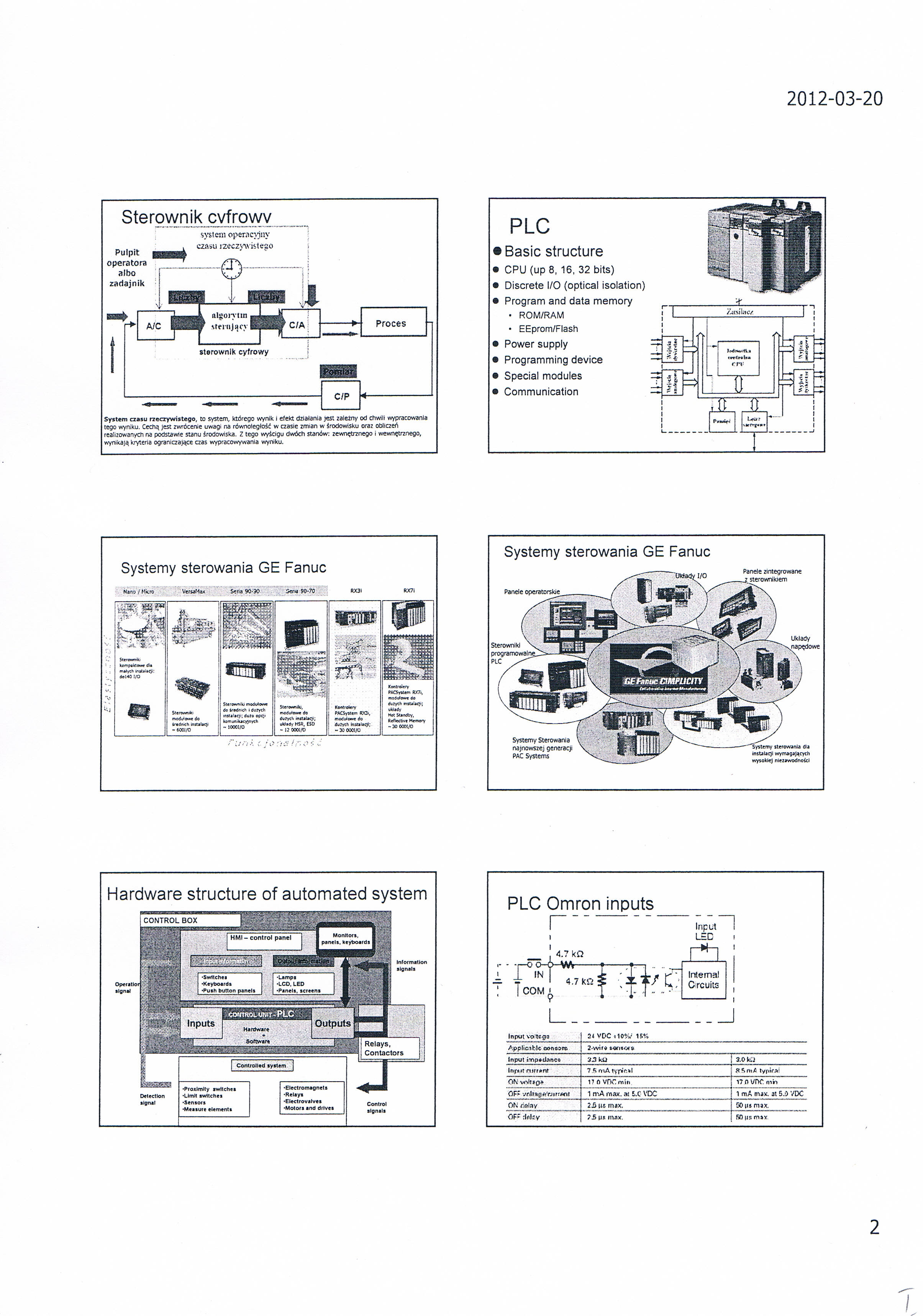
Pulpit | operatora afbo
zadajnik
system operacyjny czasu rzeczywistego

PLC
• Basic structure
• CPU (up 8, 16, 32 bits)
• Discrete l/O (optical isolation)
• Program and data memory
• ROM/RAM
• EEprom/Flash
• Power supply
• Programming device
• Special modules
• Communication
|
1 i |
i | ||
|
h,A |
Proces | ||
sterownik cyfrowy
CIP 4-
System czasu rzeczywistego, to system, którego wynik i efekt działania jest zależny od chwili wypracowania tego wyniku. Cechą jest zwrócenie uwagi na równolegtość w czasie zmian w środowisku oraz obliczeń realizowanych na podstawie stanu środowiska. Z tego wyścigu dwóch stanów: zewnętrznego i wewnętrznego, wynikają kryteria ograniczające czas wypracowywania wyniku.
Nano I M*ro VersaMa* S^na 90 30 jtit 90-70 RX3i RX7l
|
ęjjb |V- i **%/. ¥■ '■■ ' Sterowniki małych instalacji: |
*33® |
Ji_ |
mm |
' -u.'.. | |
|
Sterowniki modułowe do iredruch instalacji -6001/0 |
komunikacyjnych - 10001/0 |
dutych instalaqi; układy HSR, ESO |
Kontrolery PACSySem RX3i, modtJowe do dujych Instalacji; -30 0001/0 |
PACSrWem 11X7.. dutych msłalac;.; Mot Standby. RcOectryc Memory |

Systemy Sterowania najnowszej generacji PAC Systems
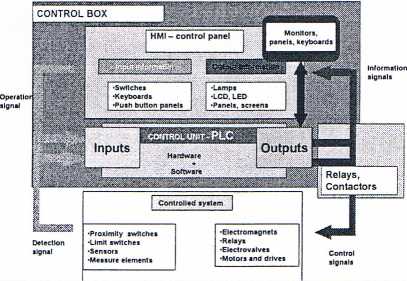
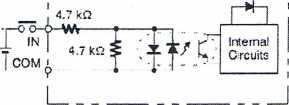
Input I
i LED i
|
input voitcgo |
24 VDC «10%; 15% | |
|
Applicnblc oonoorc |
2-wił* toricors | |
|
Input t.T)p»cJanco |
3.3 kU |
3,0 kij |
|
Input rtirront |
7.5 mA typfa»l |
S5mA typicni |
|
ON volt*o* |
17 0 vf)0 min |
17 n t/r>C mn |
|
OF? vnlt»o/t‘rjirrwit |
1 mA roax. ai S.C VDC |
1 mA max. at 5.0 VDC |
|
ON rolny |
2S» (u tnax. |
50 its max. |
|
OF? rlnk y |
75 m* »n«x. |
50|isrn»y. |
2
Wyszukiwarka
Podobne podstrony:
Sterowniki urządzeń - tryb chroniony Większość współczesnych systemów operacyjnych w komunikacji z
specjalnie do tego celu przygotowanym systemem operacyjnym czasu rzeczywistego RTAI-Linux. Syntezę a
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15a®zSystemy
Temat: Systemy operacyjne czasu rzeczywistego (FreeRTOS, LynxOS, RTLinux) w systemach
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15a®zModel zad
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Zarządzan
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Własności
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Procesory
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Minimalne
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Dziedziny
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Dziedziny
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*System
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15*®*Produkcja
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*System
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Budowa sy
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Podział
SWB - Systemy operacyjne czasu rzeczywistego. Przykłady systemów wbudowanych - wykład 15”®*Maszyna
więcej podobnych podstron