P1100083

jest to podstamnee nh\?tt»u'e wznwniaaa operacyjnego * odwracającym układzie pracy.
Posłać i parametry żądanej operacji liniowe i są okroiłone przez charakter im-pcdaucji Z\ (impedsiicja wejściowa} i Z<.
Rówwwic (2-41 a) można In kie napisać w postoci
(2.4 Jb)
Jeśli impnbncp Z, ma mulą wartość, omawiany obwód może pracować jako miernik prądu. Saptęae wyjSdowe odzwierciedla zmiany natężenia prądu w badanym obwotMe i nie zalety od wzmocnienia.
Jeśli mierzony sygpaf wprowadzany jest na dodatnie (nieodwrautjącc) wejście, mówi się o nieodwraeająeym układzie pracy wzmacniacza operacyjnego (rys. 2.6).
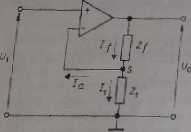
Rys. 2.6. Nicodwrncpjący układ pracy wzmacniacza operacyjnego
Wobec dużej wartości impedancji wejściowej znowu obowiązuje równanie (2.39). Potencjał punktu Sniewiele różni się od potencjału zacisku nicodwracającego, który w tym przypadku nic jest równy zeru
(2-42)
Ua | (ft yk 0
Prądy 7, i If można żalem przedstawić w postaci
V*
mm
Po podstawieniu do tych równań drugiej zależności (2.39) otrzymuje się podstawowe równanie wzmacniacza operacyjnego w nieodwracającym układzie pracy
(2.43)
Uo Zt+Z,
U>~ Zt
Spodek napięcia na impedancji Z,
li Zt = ua » lft (2.44)
można zatem regulować przy pomocy napięcia porównawczego U%. Przy zmianie Z, prąd /, zmienia się tak, żeby byfo spełnione równanie (2.44). Ta własność układu nicodwracającego jest wykorzystywana przy realizacji poicnejos tatów i amperosta-tów (palrz sir. 47).
Szczególny przypadek układu nicc-dwracająccgo występuje, gdy Z m O i Z •*=
i*' cdy, c*k' napięcie wyjściowe wprowadzane jest *'4owrotcm na odwracające jako ujemne sprzężenie zwrot r.e W takim przypadku
|
o — - |
(2*5) |
|
1 1U. | |
|
11 o - |
,—1 r T —--—O |
Rys. 2.7. Miernik napięcia
Wzmocnienie >4’ ■ I. Układ służy juko miernik napięcia. Ma on tę zaletę.. 2© badane Źródło napięcia jest zupełnie nie obciążone, podczas gdy na wyjściu miernika ozyskuje sie prądy o dużym natężeniu. Iraped uncja wejściowa jest bardzo wysoka
Z\ — AZt (2.46)
2.2. APARATURA POMIAROWA
Zespól środków technicznych, które przeznaczone są do wykonywania pomiarów, nazywany jest aparaturą pomiarową. Wielkości mierzone po detekcji (która odbywa się W różny sposób) zamieniane są na odpowiedni sygnał elektryczny proporcjonalny do mierzonej wielkości. Każdą aparaturę pomiarową można podzielić na trzy części (rys. 2.8), tj.
1) część czujnikową (detektor),
2) część przetwarzającą (przetwornik),
3) część wyjściową (przyrząd pomiarowy).
Sprzt&nis tnrotnr
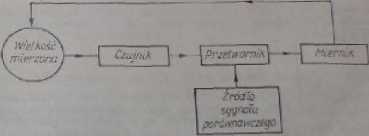
Rys. 2.8. Schemat blokowy aparatury pomiarowe i
Jeśli aparaturę pomiarową uzupełni się urządzeniem, które w przetworniku porównuje sygnał mierzony z sygnałem odniesienia » na podstawie ióżnicy sygnałów kontroluje badany układ za pośrednictwem sprzężenia zwrotnego, otrzymuje \ią uradzenie regulacyjne.
Wyszukiwarka