podst au 2 skan0013

Korekcja w układzie nieliniowym (układ regulacji temperatury)
1. Sprawdzanie elementu nieliniowego, przekaźnika dwupolożeniowcgo z histerezą W Matlab - Simulink wykonać symulację następującego układu:
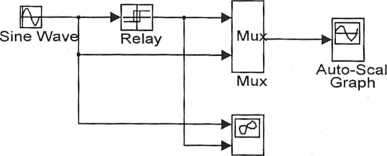
XY Graph
ustawione parametry:
SineWave: amp=2, freq=l [IIz] *2*pi, phasc=0
Relay: 0,5, -0,5 1 -1
Parametry symulacji: zakres symulacji: 0...3 sek.
Zaobserwować i przeanalizować działanie elementu nieliniowego.
2. Układ regulacji temperatury (bez korektora)
Zamodelować działanie układu regulacji według schematu poniżej. Parametry obiektu (np. pomieszczenia w którym dokonujemy regulacji temperatury) i elementu nieliniowego podane przez prowadzącego.
Qł
Step Input
Sum
Relay
Mu)^
jh
T1T2.S +3T2s ł-1
Transfer Fen
Mux
Auto-Scal
Graph
Wyznaczyć następujące parametry: czas do pierwszego maksimum - okres drgań,
7>3©
V$oO
ver!e
, «--& OYT'
- amplitudę drgań,
- maksymalny zakres zmian skoku jednostkowego, dla którego działa regulacja.
3. Dobór korektora dla układu regulacji temperatury
Na podstawie zadanej przez prowadzącego wymaganej amplitudy drgań, przy użyciu programu korjilin.m dobrać parametry korektora.
4. llkiad regulacji temperatury (z korektorem)
Zamodelować działanie układu regulacji z korektorem wg schematu jak poniżej:
m-
Step Inpui-
Sum Gain
T/alfa.s+1 —^
Transfer Fcn1 Relay
T1T2.S +3T2S-1
Auto-Scal
Graph
Transfer Fen
Wyznaczyć następujące parametry:
- czas do pierwszego maksimum,
- okres drgań,
- amplitudę drgań,
- maksymalny zakres zmian skoku jednostkowego, dla którego działa regulacja. Porównać te parametry z parametrami odczytanymi w punkcie 2.
6. Sformułować wnioski i uwagi.
2
Wyszukiwarka
Podobne podstrony:
podst au 2 skan0012 KOREKCJA CYFROWA 1. Dana jest transmitancja obiektu Go(s). Policzyć transmitancj
Układ regulacji temperatury Regufoga temperatury na podstawę ustaionej wartośa progowe)
Układ regulacji temperatury% iONOFF----*- ■ ♦ ł 1 I f
Układ regulacji temperatury Tabela prawdy Przebieg działania
Układ regulacji temperatury Tabela prawdy Przebiec działania
Układ regulacji temperatury*1 x, I M* i Tabela Karnaugha dla
więcej podobnych podstron