Scan0096
L1 L2 L3

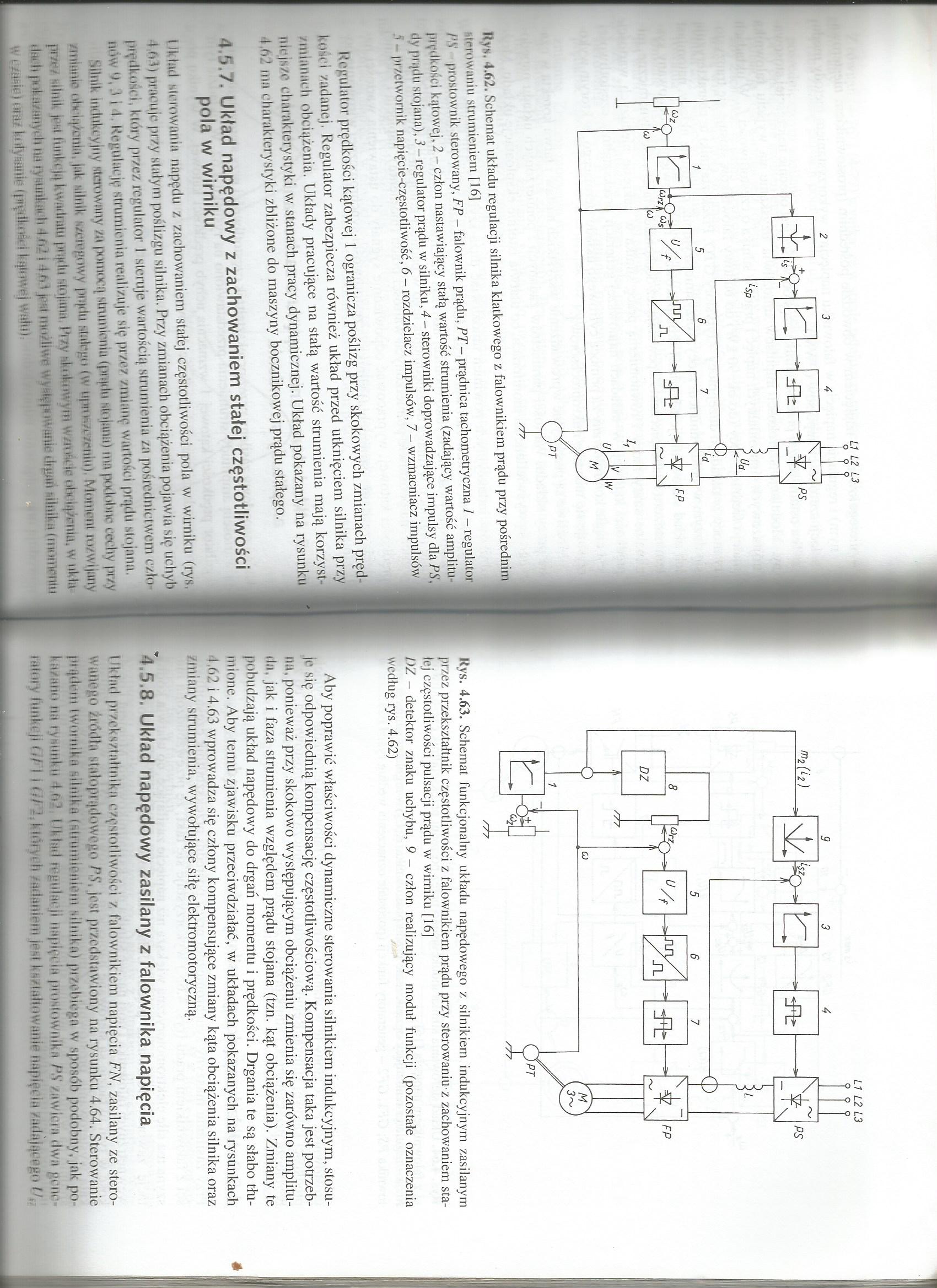
|tvs. -4,62. Schemat układu regulacji silnika klatkowego z falownikiem prądu przy pośrednim ii-mw aiiiu strumieniem [16]
/ '. prostownik sterowany, FP - falownik prądu, PT - prądnica tachometryczna 7 - regulator l>n, dkości kątowej, 2 - człon nastawiający stałą wartość strumienia (zadający wartość amplilu 11\ piądti stojana),3-regulatorprądu w silniku,4-sterowniki doprowadzające impulsy dla PS, i przetwornik napięcie-częstotliwość, 6 - rozdzielacz impulsów, 7 - wzmacniacz impulsów
Regulator prędkości kątowej 1 ogranicza poślizg przy skokowych zmianach pręd k"--i i zadanej. Regulator zabezpiecza również układ przed utknięciem silnika pr/y /miiiiuu li obciążenia. Układy pracujące na stałą wartość strumienia mają korzyst tin i.. . chaiaklcrystyki w stanach pracy dynamicznej. Układ pokazany na rysunku ! (>' ma charakterystyki zbliżone do maszyny bocznikowej prądu stałego.
I '> 7. Układ napędowy z zachowaniem stałej częstotliwości pola w wirniku
UMwl '.terowania napędu / zachowaniem stałej częstotliwości pola w wirniku (rys.
11‘ t) priu iip przy stałym poślizgu silnika. Przy zmianach obciążenia pojawia się uchyb j ii ..i Ikosei. Moi y przez regulator I steruje wartością strumienia za pośrednictwem czło now u t i I Regulację strumienia realizuje się przez zmianę wartości prądu slojaua.
Silnik ii u luk. yjny stemwauy za [łomocą sit umienia (piądu sU^aiui) ma |HHlobue cechy ptzy /mituile obciążenia, jak silnik /cięgowy piądu stałego iw upm .miui Momeiii inzwijaiiy pi/t ilnil |esl Ilinkeją k wadi atu prądu siojuiia Pi/\ lnt>r- , m . /nisrlr nU lą/rulu, w uMa d«i* h [ml M/aiiyi li na lysuiil hi li 4 fiJ i -1 fi l mii/liwi ■ lęj«»**.unit diuna silnika imumriilii lV t ZUsir) i liaz ki i!. Uhl ile I [Hidki r- I 1 tj!« iiS r j e atll I
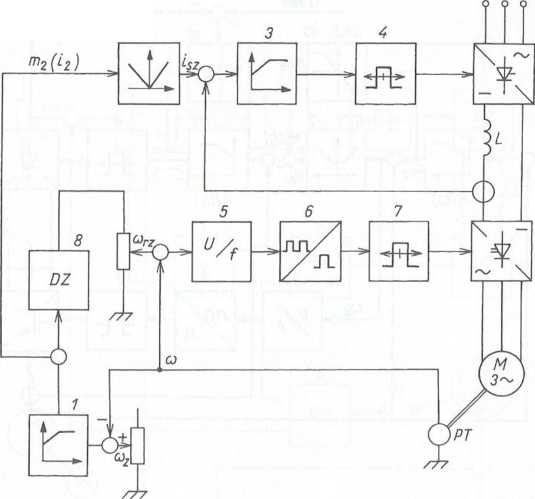
Rys. 4.63. Schemat funkcjonalny układu napędowego z silnikiem indukcyjnym zasilanym przez przekształtnik częstotliwości z falownikiem prądu przy sterowaniu z zachowaniem stałej częstotliwości pulsacji prądu w wirniku [16]
/>Z - detektor znaku uchybu, 9 - człon realizujący moduł funkcji (pozostałe oznaczenia według rys. 4.62)
Aby poprawić właściwości dynamiczne sterowania silnikiem indukcyjnym, stosuje się odpowiednią kompensację częstotliwościową. Kompensacja taka jest potrzebna, ponieważ przy skokowo występującym obciążeniu zmienia się zarówno amplituda, jak i faza strumienia względem prądu stojana (tzn. kąt obciążenia). Zmiany te pobudzają układ napędowy do drgań momentu i prędkości. Drgania te są słabo tłumione. Aby temu zjawisku przeciwdziałać, w układach pokazanych na rysunkach I 02 i 4.63 wprowadza się człony kompensujące zmiany kąta obciążenia silnika oraz zmiany strumienia, wywołujące siłę elektromotoryczną.
"i 5 Jł Układ napędowy zasilany z falownika napięcia
i ! lad pi/elo./iaHnik.i * /y-lolliwosei z falownikiem napięcia FN, zasilany ze stero-■ tu u* go /mdlą ‘.tidopiądowi go l'S, jest przedstawiony na rysunku 4.64. Sterowanie piijdem twmnikn silnika (slimuleniem silnika) pi/ehiega w sposób podobny, jak po I a/uiii i na i \ sinik u 4 62 Układ i rynku, ji napięcia prostownika /W zawici a dwa gene miot \ Inni > |i < •/ I i 1.7 2 i iin ,. li uduniriii jrsi I i/ialiou anit-napii, t ia -iidaiąt ego 10
Wyszukiwarka
Podobne podstrony:
Scan0052 2 System elektroenergetyczny A U<; f< System elektroenergetyczny D U?; L1 L2 L3 Z- sy
Licznik 3 fazowy Schemat podłączenia licznika 3-fazowego I L1 L2 L3 N
> Glonass /JtSfa. Glonass-M ■ Glonass-KM L1 L2 L3 L1,
M 250 L1 L2 L3>[][][] FR 103 ■v S T I I> I> > ChS PT
L1 L2_ _ L3_4L L3 NPE N W_N_ i PE
L1 L2 L3 PE Roz. izolacyjny FR 304 do garażu 63A Roz. izolacyjny FR 304 63A do
dahlandera 1kierunek 1 »T3 J5 L1 L2 L3 4 6■Qi7
SNC00357 STANDARDOWE PROGRAMY ŁĄCZEŃ L1 L2 L3 lii 2 6 18 Rozłączniki gwiazda - trójkąt ...-29-.. *
WERSJA SKRÓCONAUkład instalacji TN-C wg PN-HD 60364-1 V L1 L2 L3 N PE przy źródle
CCF20110310�054 N ®- -®- Sv V AYWW yVWW WWW W L1 L2 L3 PEN O Rb
18510 SNC00357 STANDARDOWE PROGRAMY ŁĄCZEŃ L1 L2 L3 lii 2 6 18 Rozłączniki gwiazda - trójkąt ...-2
0000005 (15) a) b) c) L1 L2 L3 L1 L2
Scan0037 3 iivi, M. Nicslerowany prostownik trójfazowy mostkowy; a) schemat układu; b) puebieg na l&
Scan0039 Mys 1.7, tyrystorowy prostownik jednofazowy jednopulsowy: a) schemat układu, b) przebieg nu
Scan0043 4 LI L2 L3 PSI PSU Rys. 3.14. Nawrotny układ napędowy prądu stałego [18] /’,S I, PSU - sekc
więcej podobnych podstron