IMGX64
MODUŁ STOLIKA LINIOWEGO ■Całkowite opory ruchu Te w prowadnicy typu (J2)
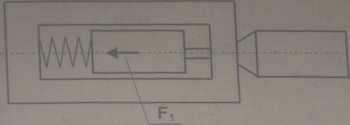
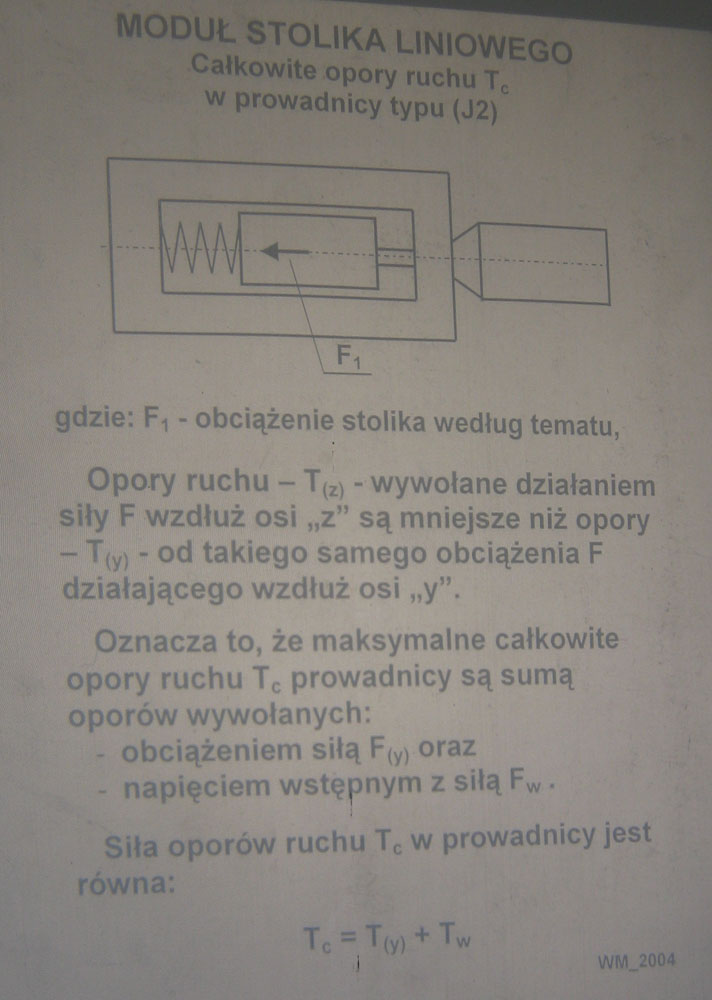
gdzie: Fi - obciążenie stolika według tematu,
Opory ruchu - T(z) - wywołane działaniem siły F wzdłuż osi „z” są mniejsze niż opory - T(y) - od takiego samego obciążenia F działającego wzdłuż osi „y”.
Oznacza to, że maksymalne całkowite opory ruchu Tc prowadnicy są sumą oporów wywołanych:
- obciążeniem siłą F(y) oraz
- napięciem wstępnym z siłą Fw .
Siła oporów ruchu Tc w prowadnicy jest równa:
TC = T(y) + T,
WM_2004
Wyszukiwarka
Podobne podstrony:
IMGX57 (2) MODUŁ STOLIKA LINIOWEGO Całkowite opory ruchu prowadnicy typu (P) gdzie: Fn - obciążenie
strona07 Całkowite opory ruchu Tc w prowadnicy typu (J) gdzie: Fi - obciążenie stolika, Fi = 5 N Opo
DSC00477 MODUŁ STOLIKA LINIOWEGO Obciążenie siłą F(yi w płaszczyźnie ruchu (J2j Składowe Fn2 i FS2 -
IMGX65 MODUŁ STOLIKA LINIOWEGO Wymagania dotyczące sprężyny w prowadnicy typu (J2) Minimalna si
DSC00470 moduł stolika liniowego Obciążenie siłą Fm prostopadłą do stofłka (J2) °’S^-Ł_ Z r F(zy
DSC00465 MODUŁ STOLIKA LINIOWEGO Wymiary separatora U2 L/2 — r£K tli_t_ I ------ L/4
IMGX59 (2) MODUŁ STOLIKA LINIOWEGO Wymagania dotyczące sprężyny w prowadnicy typu (P) Minimalna
IMG@43 (3) główne cechy nlaty: • mato opory ruchu, zwłaszcza przy małej prędkości
ma widmo liniowe). Promieniowanie emitowane przez te lampy bardzo skutecznie niszczy haktcnc. Z tego
Przy przepływie wody przez tereny porośnięte krzewami opory ruchu zależą od gęstości elementów rośli
Opory ruchu w ruchu laminarnym jednostajnym Równanie to ważne jest dla wydzielonego obszaru o promie
DSC00455 Montowatue zeslawara© stolików liniowych firmy Photon Control Photon Contr3 W.J. 2003
więcej podobnych podstron