51
94 A.S. Jagiełło, Systemy elektromechaniczne dla elektryków
Powyższe równanie, jako liniowe, można rozwiązać analitycznie. Niemniej jednak interesuje nas tutaj wyłącznie rozwiązanie asymptotyczne, lub inaczej mówiąc -rozwiązanie dla stanu ustalonego. Przewidujemy to rozwiązanie w postaci: x = x0 +a-j, gdzie x0 jest rozwiązaniem dla wymuszenia stałego pochodzącego od siły ciężkości, a xl jest rozwiązaniem dla wymuszenia sinusoidalnie przemiennego. Teraz możemy napisać dla x0:
X° ~ k
oraz, wykorzystując rachunek symboliczny, dla x{.
2m„eQ/
k - (m + 2me )Q2 + JDXQ Ostatecznie więc otrzymamy następującą postać:
jCos{Qt+$0-y) (11.6)
x(t) =
(m + 2me)g 2 meQ2
gdzie
y = a tan
Pulsację rezonansową wibratora wyznaczymy, obliczając maksimum amplitudy funkcji cosinus w wyrażeniu (11.6), zatem:
2maeQ"
^ -\j[k ~ {m + 2me )02 j2-ł- {DxQ.y
stąd
O = k
2k(m + 2me)-D2
(11.7)
Natomiast maksymalna amplituda drgań wibratora wyrazi się wzorem:
(11.8)
4 kmee
D^4k(m + 2me)-D^
W rzeczywistych układach wibratory mają tak dobrane parametry, aby wykazywały charakter rezonansowy, zatem musi zachodzić silna nierówność:
2k(m + 2me))D2x (11.9)
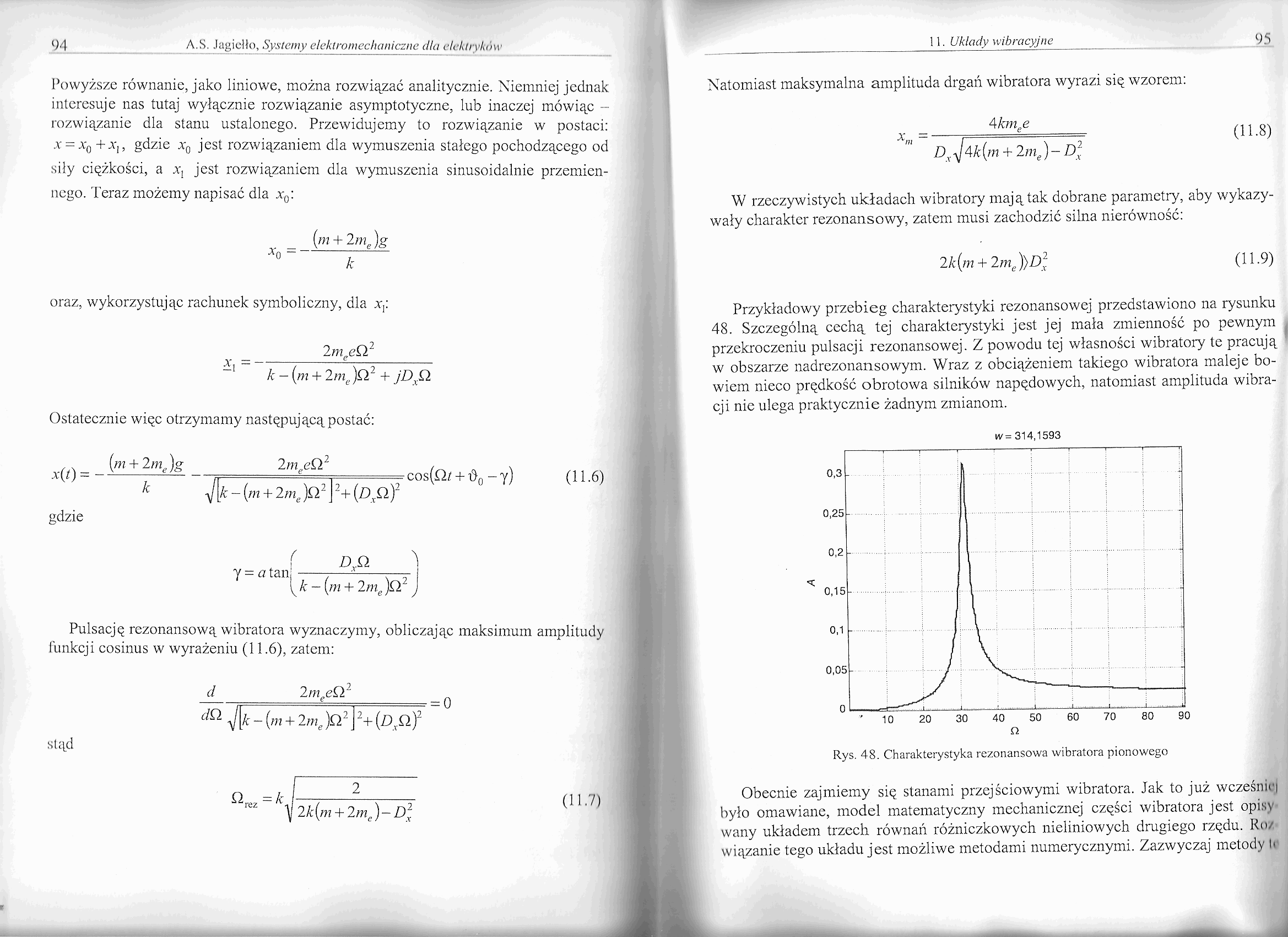
Przykładowy przebieg charakterystyki rezonansowej przedstawiono na rysunku 48. Szczególną cechą tej charakterystyki jest jej mała zmienność po pewnym przekroczeniu pulsacji rezonansowej. Z powodu tej własności wibratory te pracują w obszarze nadrezonansowym. Wraz z obciążeniem takiego wibratora maleje bowiem nieco prędkość obrotowa silników napędowych, natomiast amplituda wibracji nie ulega praktycznie żadnym zmianom.
w = 314,1593
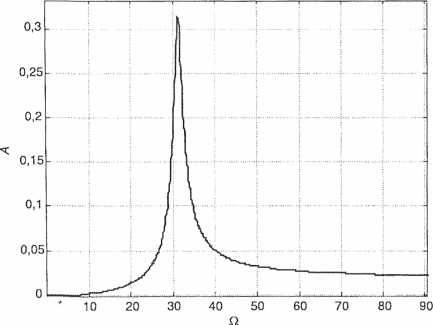
Rys. 48. Charakterystyka rezonansowa wibratora pionowego
Obecnie zajmiemy się stanami przejściowymi wibratora. Jak to już wcześniei było omawiane, model matematyczny mechanicznej części wibratora jest opisy-wany układem trzech równań różniczkowych nieliniowych drugiego rzędu. Ro/ wiązanie tego układu jest możliwe metodami numerycznymi. Zazwyczaj metody U'
Wyszukiwarka