58
108 A S Jagiełło, Systemy eleklromcclianic: ne dla , /< hu i hi>\\
obrotowego wirnika. Schemat takiego układu przedstawiono na rysunku 61. Dla takiego systemu elektromechanicznego konieczne jest pewne zmodyfikowanie modelu opisanego układem równań (12.1). Ponieważ teraz możliwe jest kątowe przesunięcie nie tylko wirnika -d*, ale także stojana musimy zatem napisać: $ = Ze względu na fakt, że w ogólności kąt obrotu organu roboczego
może wykonywać ruch obrotowy niezależny liniowo od ruchów stojana i wirnika, wymaga on niezależnego oznaczenia - i3-z. Teraz można napisać równania modelu matematycznego analizowanego tu systemu elektromechanicznego.
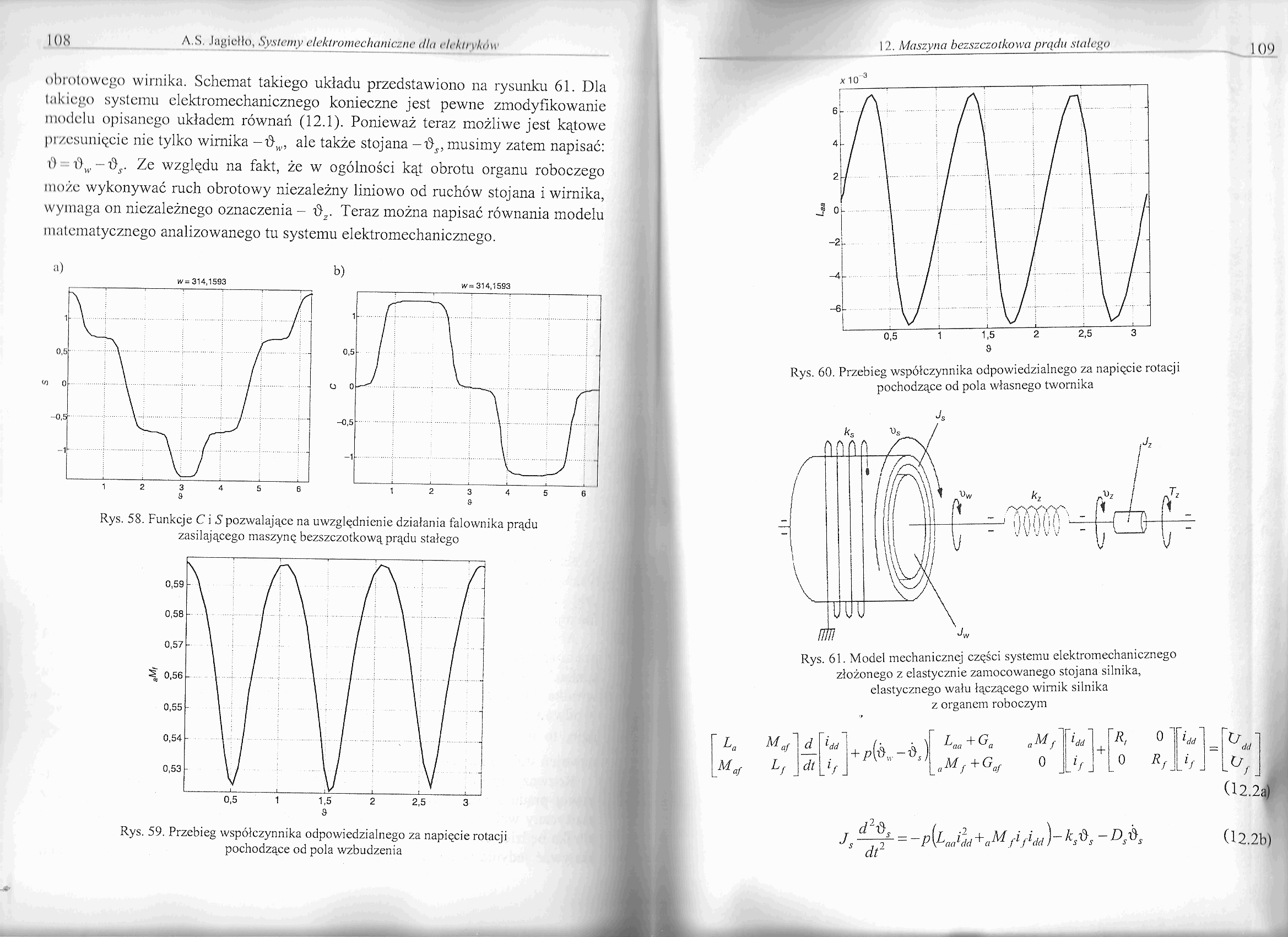
w= 314,1593 w= 314,1593
a)
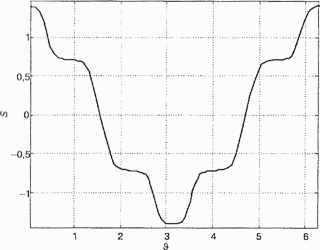
b)
Rys. 58. Funkcje C i 5 pozwalające na uwzględnienie działania falownika prądu zasilającego maszynę bezszczotkową prądu stałego
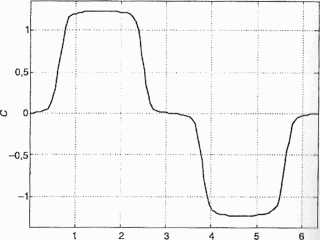
Rys. 59. Przebieg współczynnika odpowiedzialnego za napięcie rotacji pochodzące od pola wzbudzenia
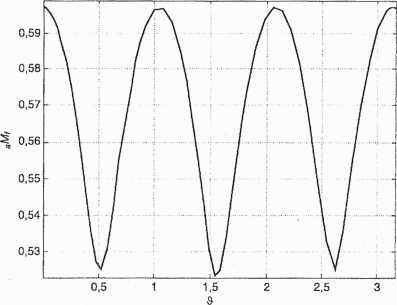
x lO ^3
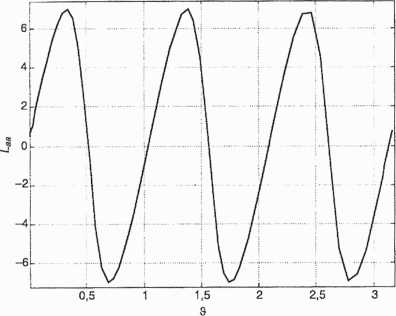
Rys. 60. Przebieg współczynnika odpowiedzialnego za napięcie rotacji pochodzące od pola własnego twornika
Js
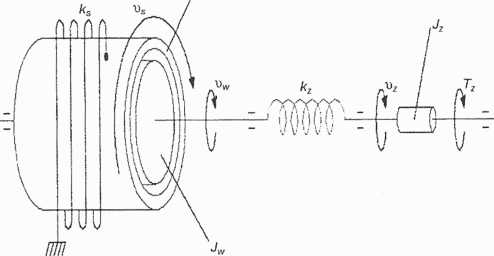
Rys. 61. Model mechanicznej części systemu elektromechanicznego złożonego z elastycznie zamocowanego stojana silnika, elastycznego wału łączącego wirnik silnika z organem roboczym
d_
dt
o
Rr
J,^ = -p(LJ^+„MrifiM)-kA-DA
dt~
02.2b)
Wyszukiwarka