45
A.S. Jagiełło, Systemy elektromechaniczne dla elelai ykiiw
82
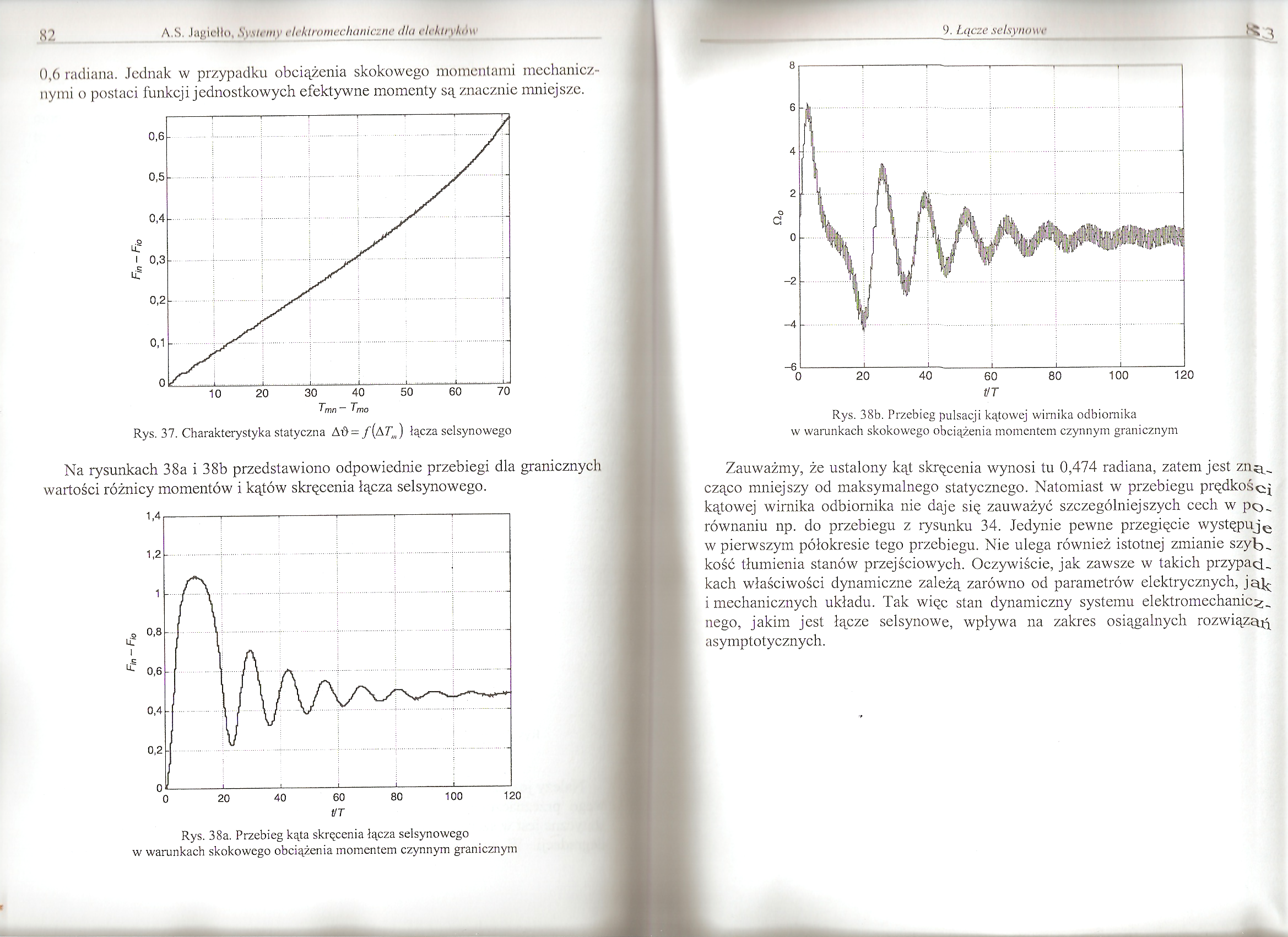
0,6 radiana. Jednak w przypadku obciążenia skokowego momentami mechanicznymi o postaci funkcji jednostkowych efektywne momenty są znacznie mniejsze.
Rys. 37. Charakterystyka statyczna A$=f(ATm) łącza selsynowego
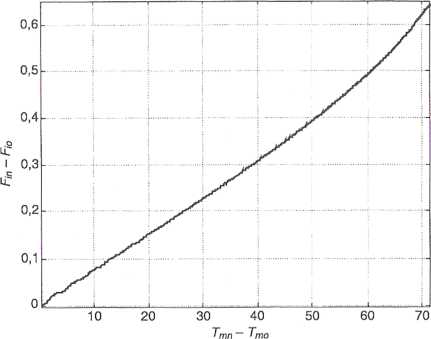
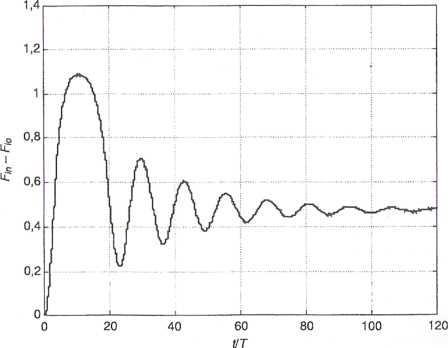
Na rysunkach 38a i 38b przedstawiono odpowiednie przebiegi dla granicznych wartości różnicy momentów i kątów skręcenia łącza selsynowego.
Rys. 38a. Przebieg kąta skręcenia łącza selsynowego w warunkach skokowego obciążenia momentem czynnym granicznym
Rys. 38b. Przebieg pulsacji kątowej wirnika odbiornika w warunkach skokowego obciążenia momentem czynnym granicznym
Zauważmy, że ustalony kąt skrócenia wynosi tu 0,474 radiana, zatem jest zn^ cząco mniejszy od maksymalnego statycznego. Natomiast w przebiegu prędkoś^ kątowej wirnika odbiornika nie daje się zauważyć szczególniejszych cech w porównaniu np. do przebiegu z rysunku 34. Jedynie pewne przegięcie występuje w pierwszym półokresie tego przebiegu. Nie ulega również istotnej zmianie szybkość tłumienia stanów przejściowych. Oczywiście, jak zawsze w takich przypadkach właściwości dynamiczne zależą zarówno od parametrów elektrycznych, jak i mechanicznych układu. Tak więc stan dynamiczny systemu elektromechanicznego, jakim jest łącze selsynowe, wpływa na zakres osiągalnych rozwiązań asymptotycznych.

Wyszukiwarka