60

112 A.S. Jagiełło, Sy.\h,m\i elekt minet•lianit•/«<• dla elektryków
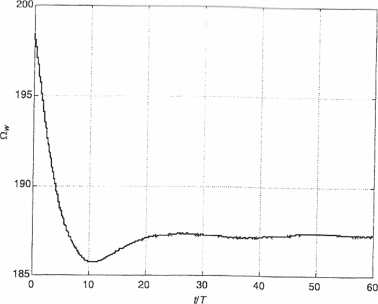
Rys. 65. Przebieg prędkości kątowej wirnika podczas skokowego obciążenia momentem czynnym
W powyższych symulacjach cyfrowych przyjęto, że moment bezwładności wirniku jest powiększony o moment bezwładności organu roboczego.
Ad 2.
a) Rozruch na biegu jałowym.
Porównanie przebiegów na rysunkach, odpowiednio - 62 i 66 oraz 63 i 67 - pozwala na stwierdzenie, że elastyczny wał przenoszący moment pochodzący od bezwładności organu roboczego nie wnosi istotnych różnic w charakterystyce rozruchowej. Jedyną różnicą jest tu niewielkie „kołysanie się” prędkości kątowej wirnika w początkowej fazie rozruchu, przy czym amplituda tego kołysania maleje wraz ze zbliżaniem się prędkości do stanu ustalonego. Kształt momentu przenoszonego przez elastyczny wał przedstawiono na rysunku 68. Jak łatwo zauważyć, wartość maksymalna tego momentu jest niewiele tylko mniejsza od udarowej wartości momentu elektrycznego wytwarzanego przez silnik podczas rozruchu. Istotnii jest tu bardzo znaczna składowa zmienna, która w warunkach częstych rozruchów może powodować zmęczenie materiału wału.
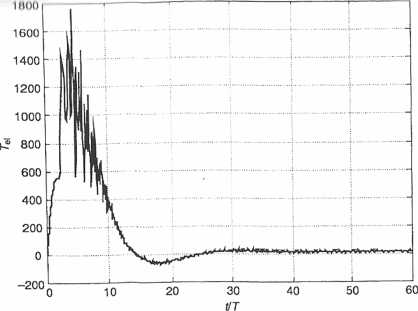
Rys. 66. Przebieg momentu elektrycznego podczas rozruchu na biegu jałowym w warunkach sztywnego zamocowania stojana
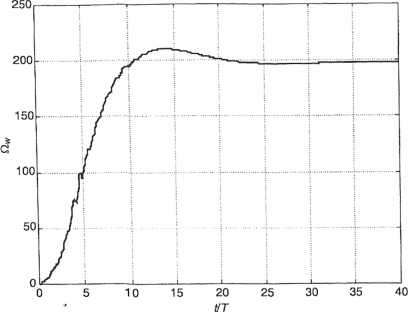
Rys. 67. Przebieg prędkości kątowej wirnika podczas rozruchu na biegu jałowym w warunkach sztywnego zamocowania stojana
b) Skokowe obciążenie momentem czynnym.
W analizowanym systemie elektromechanicznym moment mechaniczny zostanie zasymulowany funkcją jednostkową generowaną przez organ roboczy. Wyniki symulacji zostały przedstawione na rysunkach 69-71.
Wyszukiwarka