69


14. DYNAMICZNY ELIMINATOR DRGAŃ
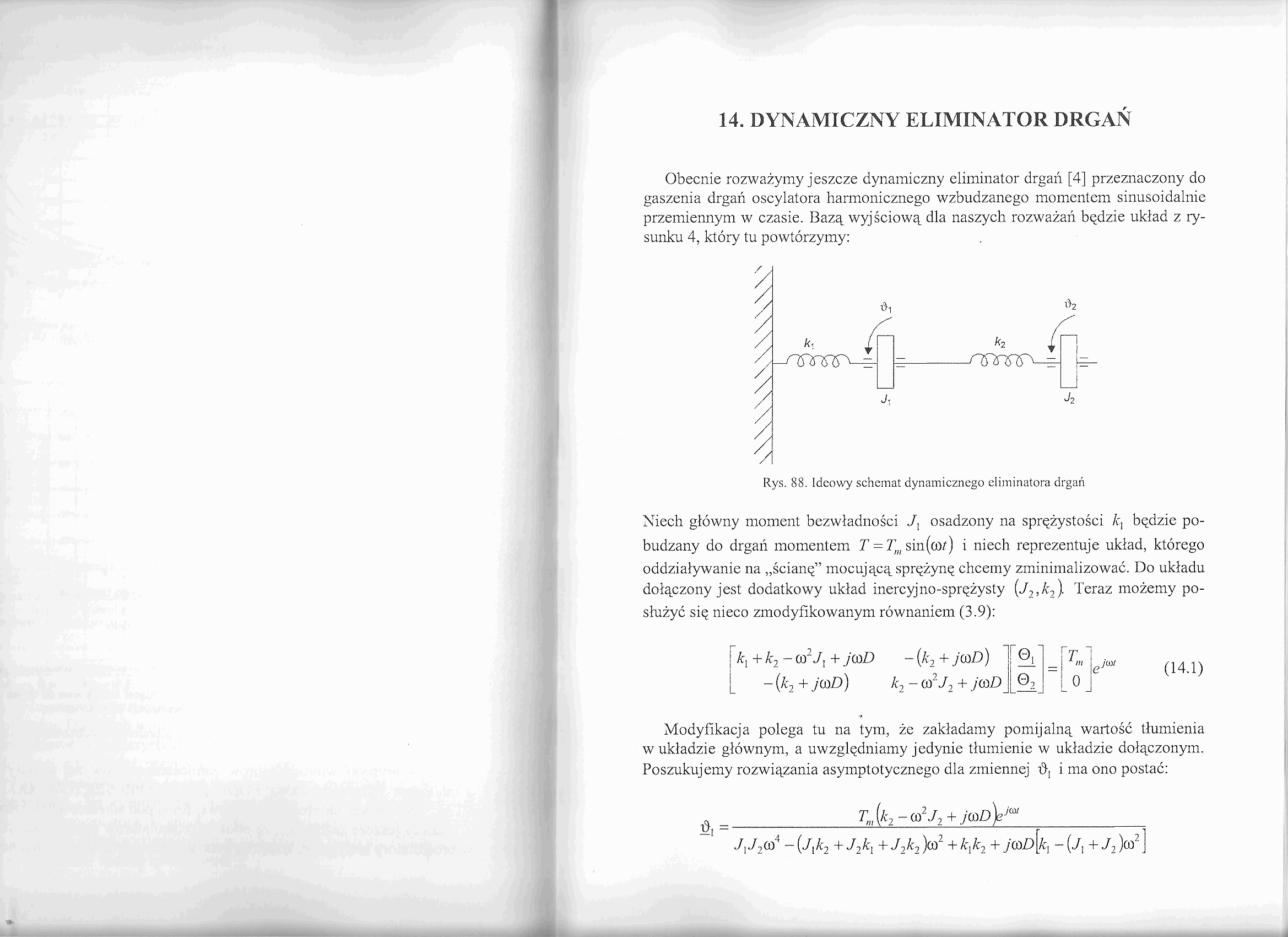
Obecnie rozważymy jeszcze dynamiczny eliminator drgań [4] przeznaczony do gaszenia drgań oscylatora harmonicznego wzbudzanego momentem sinusoidalnie przemiennym w czasie. Bazą wyjściową dla naszych rozważań będzie układ z rysunku 4, który tu powtórzymy:


/I
Rys. 88. Ideowy schemat dynamicznego eliminatora drgań
Niech główny moment bezwładności Jj osadzony na sprężystości /c, będzie pobudzany do drgań momentem T = 7]Msin(co/) i niech reprezentuje układ, którego oddziaływanie na „ścianę” mocującą sprężynę chcemy zminimalizować. Do układu dołączony jest dodatkowy układ inercyjno-sprężysty (J2,k7). Teraz możemy posłużyć się nieco zmodyfikowanym równaniem (3.9):

Modyfikacja polega tu na tym, że zakładamy pomijalną wartość tłumienia w układzie głównym, a uwzględniamy jedynie tłumienie w układzie dołączonym. Poszukujemy rozwiązania asymptotycznego dla zmiennej 13, i ma ono postać:

d,=
Wyszukiwarka