6

micznych i rozwiązań konstrukcyjnych śmigła współczesnych samolotów dzieli się na kilka rodzajów:
— Śmigło stałe, w którym kąty nastawienia łopat są stałe.
— Smagło nastawne, w którym kąty nastawienia mogą być zmieniane tylko wówczas, gdy śmigło znajduje się w stanie spoczynku; zależnie od przewidywanych warunków lotu, łopaty można wtedy nastawić na mniejsze lub większe kąty.
— Śmigło przestawiałn e, w którym kąty nastawienia łopat mogą być zmieniane podczas pracy za pomocą układu sterowania uruchamianego przez pilota.
— Śmigło samoprzestawialne, wyposażone w regulator prędkości obrotowej, który przez zmianę kąta nastawienia łopat samoczynnie utrzymuje stałą, obraną prędkość obrotową, niezależnie od zmian prędkości lotu i mocy silnika. W niektórych śmigłach tego rodzaju przez zmianę kąta nastawienia na ujemny uzyskuje się odwrócenie kierunku ciągu; w ciężkich samolotach jest to wykorzystywane przy hamowaniu podczas lądowania (dobiegu). Przez zmianę kąta nastawienia można zmieniać wartość ciągu przy stałej prędkości obrotowej wału (n = = const), w zakresie od maksymalnego, ciągu skierowanego do przodu, do maksymalnego ciągu odwróconego. Jest to wykorzystywane np. w śmigłach ogonowych śmigłowców, w śmigłach ■pociągowych wiroiotów (rozdz. 6) i in.
— Śmigło o łopatach przeciwbieżnych jest to zespół dwóch śmigieł współosiowych, obracających się w przeciwnych kierunkach; wał jednego śmigła jest osadzony wewnątrz wału drugiego śmigła i oba wały są napędzane poprzez reduktory. '
Dzięki stosowaniu dwóch śmigieł średnica ich zmniejsza się, a dzięki przeciwnym kierunkom ich obrotu jest również likwidowana reakcja momen-. tu obrotowego, która przy innych układach śmigieł wywołuje pewną tendencję do przechyleń samolotu.
W zależności od sposobu sterowania łopatami współczesne śmigła dzieli się na dwa zasadnicze rodzaje: o sterowaniu hydraulicznym i o sterowaniu elektrycznym.
— Sterowanie hydrauliczne jest obecnie najbardziej rozpowszechnione i polega na wykorzystaniu ciśnienia oleju do napędu mechanizmu przestawiania łopat.
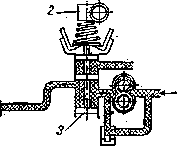
Na rys. 4.3. przedstawiono schemat jednego z układów hydraulicznych. Przesuwny tłok jest mimośrodowo połączo-
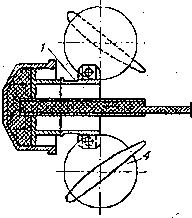
Rys. 4.3. Schemat hydraulicznej regulacji Kąta nastawienia łopat
1 — tłok, 2 — regulator, 3 — suwaki, 4 — łopata śmigła
ny z nasadą łopaty. Zmiana ciśnienia oleju wywołuje ruch tłoka i obrót łopat, osadzonych na łożyskach tocznych. Utrzymanie stałej prędkości obrotowej zapewnia odśrodkowy regulator, który dozuje dopływ oleju do układu nastaw-czego. W przypadku zmniejszenia prędkości obrotowej, regulator ten zmienia dopływ oleju, co powoduje zmniejszenie kąta nastawienia. Moment oporowy śmigła wówczas się zmniejsza, co przyczynia się do wzrostu prędkości obrotowej aż do poprzedniej jej wartości. Regulator może być sterowany bezpośrednio przez pilota.
— Sterowanie elektryczne polega na przestawianiu łopat śmigła za 'pomocą silnika elektrycznego i przekładni o bardzo dużym przełożeniu (rzędu 1 :10 000). Silnik może obracać się w dwóch kierunkach, przy czym zmianę kierunków obrotu wywołuje regulator.
Wyszukiwarka