70
lub w postaci czasowej:
|
(k2 - CO2 J2) |
r + (coD)2 sin(co/ + a - |
-P) | |||
|
1 |
— {j[k2 + J2k\ + J2k |
'■) )co2 + kjt2 ] |
f+M2| |
1 + to 'T to | |
(14.2)
l»dzie
a = arctg
P
= arctg——T
JlJ2<Si
Teraz możemy napisać wyrażenie na współczynnik przenoszenia, za który uważa się iloraz amplitudy momentu przenoszonego przez sprężynę kx do amplitudy momentu wymuszającego:
P =
k^(k2-u2J2j + {®D)2
(14.3)
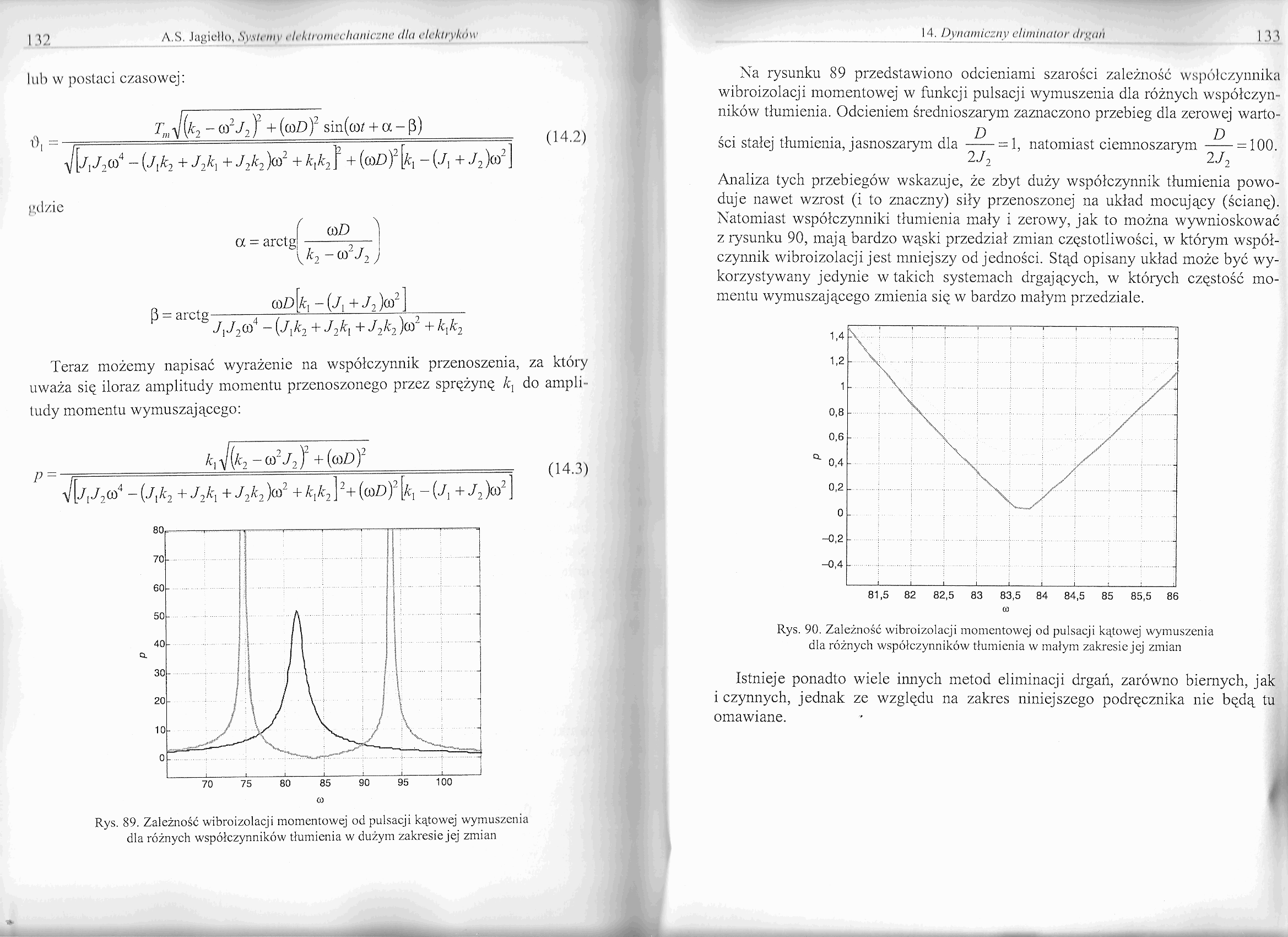
Rys. 89. Zależność wibroizolacji momentowej od pulsacji kątowej wymuszenia dla różnych współczynników tłumienia w dużym zakresie jej zmian
Na rysunku 89 przedstawiono odcieniami szarości zależność współczynnika wibroizolacji momentowej w funkcji pulsacji wymuszenia dla różnych współczynników tłumienia. Odcieniem średnioszarym zaznaczono przebieg dla zerowej wartości stałej tłumienia, jasnoszarym dla —— = 1, natomiast ciemnoszarym -^- = 100.
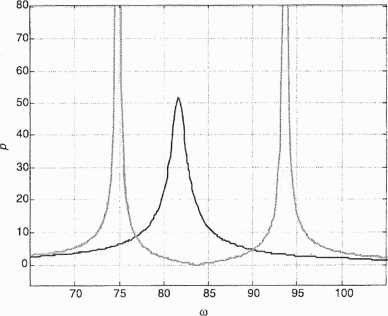
Analiza tych przebiegów wskazuje, że zbyt duży współczynnik tłumienia powoduje nawet wzrost (i to znaczny) siły przenoszonej na układ mocujący (ścianą). Natomiast współczynniki tłumienia mały i zerowy, jak to można wywnioskować z rysunku 90, mają bardzo wąski przedział zmian częstotliwości, w którym współczynnik wibroizolacji jest mniejszy od jedności. Stąd opisany układ może być wykorzystywany jedynie w takich systemach drgających, w których częstość momentu wymuszającego zmienia się w bardzo małym przedziale.
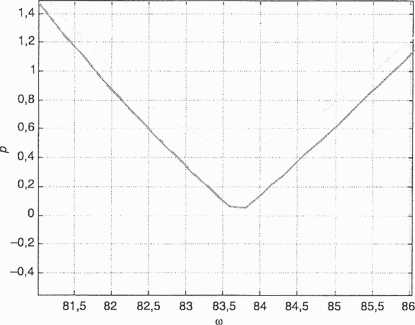
Rys. 90. Zależność wibroizolacji momentowej od pulsacji kątowej wymuszenia dla różnych współczynników tłumienia w małym zakresie jej zmian
Istnieje ponadto wiele innych metod eliminacji drgań, zarówno biernych, jak i czynnych, jednak ze względu na zakres niniejszego podręcznika nie będą tu omawiane.
#
Wyszukiwarka