73

I W
A.S. Jagiełło, Systemy elektmmeilitnitc.uie dla elektryków
W przypadku równania (15.5b) możemy napisać:


W wyniku zaznaczonych działań otrzymujemy:
|
i /,„ |
0 |
0 |
0 1 |
w r° |
0 |
0 |
0 Ul \R- |
0 |
0 |
Oj/ol |
'i/.l |
|
0 0 |
Ld 0 |
0 I, |
i/i«. 0 |
d U, i jo \ dtUi I ' ' 0 |
0 4/ |
-L(/ 0 |
o M o JĘm. ! i, l i o |
R, 0 |
0 Rs |
o o - |
u A u* |
|
0 |
l/I". |
0 |
h . |
i L'/j [0 |
0 |
0 |
o 14 [0 |
0 |
0 |
Vj\ |
(15.6)
Postępując analogicznie z równaniem (15.3b), otrzymuje się:
= plliMJSs + ~r‘. (157>
|
! i |
k |
i 4i |
i V2 |
Y |
|
=Ą |
COs(/7l}) |
cos(pd-j7t) |
cos(pń-j7t) |
h |
|
J |
[-sin(pd) |
-sin(/?$-j7t;) |
-sin^p-d-yT^j |
_h_ |
gdzie
oraz w analogiczny sposób przekształconą macierz napięć trójfazowych zasilających uzwojenia stojana:
|
V |
i |
- 1 _L _L 1 41 4i 42 |
'u; | |
|
u, |
= V¥ |
COs{]X&) COs(pń-fTc) COs(pń-y7l) |
U2 | |
|
ł |
-sin(pń) -sin(pń--=-7t) -sin(pi5--f 7c) |
U,. |
Dla symetrycznego trójfazowego zasilania napięcia te przyjmują wartość:
|
r^oi |
1 |
0 |
|
v.\ |
=SuJ |
cos(co? - ptl) |
|
I sin(atf - pi3-)J |
gdzie Uph jest wartością skuteczną napięcia fazowego zasilającego maszynę synchroniczną.

15.2. MASZYNA SYNCHRONICZNA OPISANA ZA POMOCĄ QUASI-WSPÓŁRZĘDNYCH „0 a (3”
Opis matematyczny maszyny synchronicznej za pomocą ąuasi-współrzędnych „0 d ą” jest bardzo wygodny do analizy obliczeniowej w przypadku maszyny pracującej samotnie. Sprawa się jednak bardzo komplikuje w sytuacji współpracy kilku maszyn zasilanych ze wspólnej, elastycznej sieci. Powodem tego jest fakt, że prądy i napięcia każdego z silników opisanych takim modelem zależą od chwilowego położenia własnego wirnika. W takim przypadku stosuje się najczęściej inne modele. Jednym z nich jest model matematyczny wykorzystujący współrzędne „0 a (3”. Macierzą przekształcenia jest tu macierz Clarka o postaci:

Teraz postępowanie jest analogiczne jak w przypadku transformacji Parka, tyle tylko, że macierz Clarka nie sprowadza do postaci diagonalnej macierzy indukcyj-ności stojana. W rezultacie tych działań otrzymuje się:
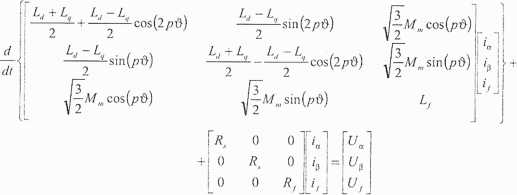
(15.9a)

2
Wyszukiwarka