74
MO A.S. Jagiełło, S\‘,\h7/ir rh liiiiiiin‘(’li(inlt'~ni‘ <ll(i elektryków
gilzie
|
~U0] |
I 0 ! |
|
Ua\ |
! = SuJ cos(cor) |
|
kpj |
! sin(co^) j |
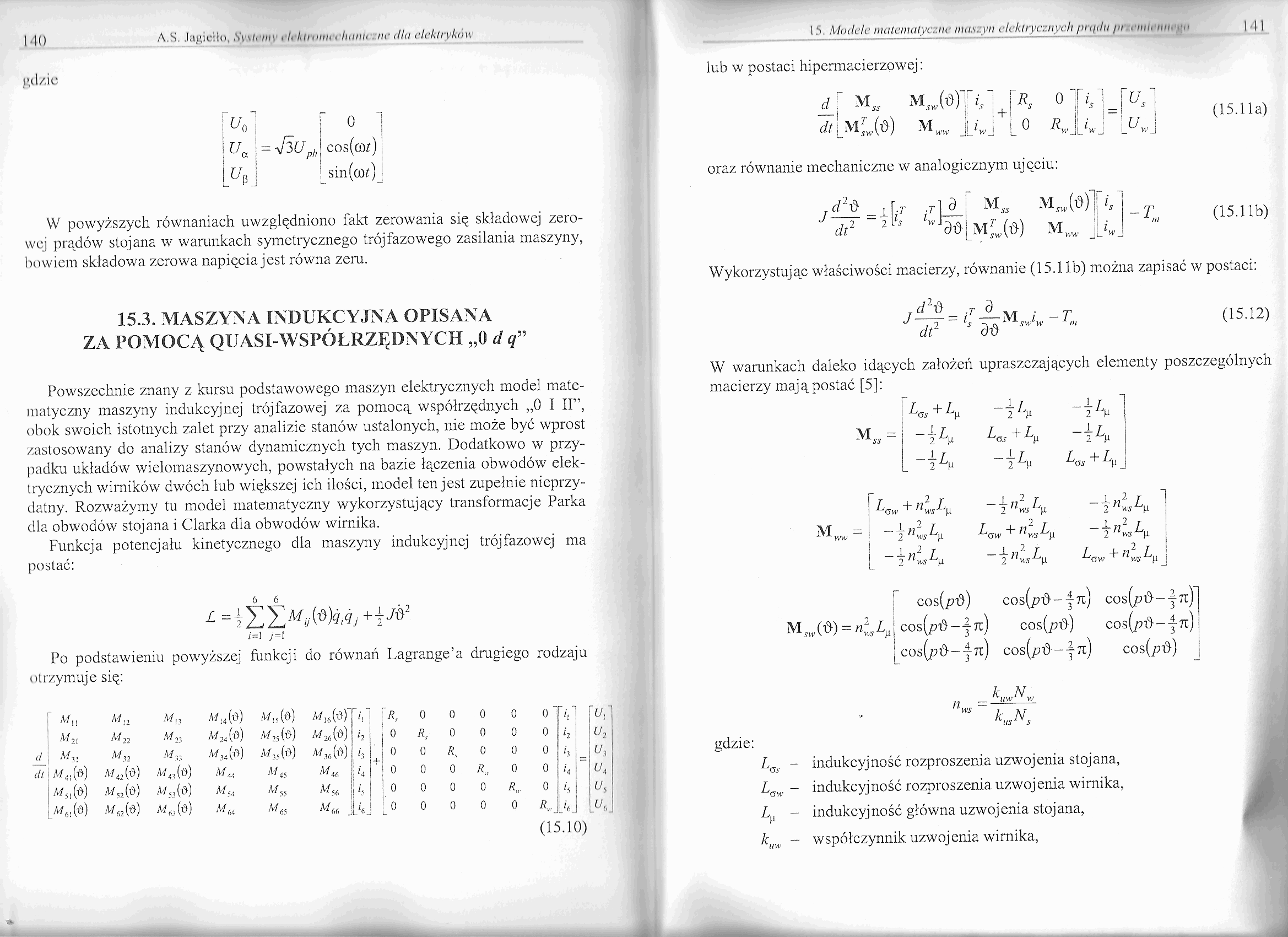
W powyższych równaniach uwzględniono fakt zerowania się składowej zerowej prądów stojana w warunkach symetrycznego trójfazowego zasilania maszyny, bowiem składowa zerowa napięcia jest równa zeru.
15.3. MASZYNA INDUKCYJNA OPISANA ZA POMOCĄ QUASUWSPÓŁRZĘDNYCH „0 d q”
Powszechnie znany z kursu podstawowego maszyn elektrycznych model matematyczny maszyny indukcyjnej trójfazowej za pomocą współrzędnych „0 I II”, obok swoich istotnych zalet przy analizie stanów ustalonych, nie może być wprost zastosowany do analizy stanów dynamicznych tych maszyn. Dodatkowo w przypadku układów wielomaszynowych, powstałych na bazie łączenia obwodów elektrycznych wirników dwóch lub większej ich ilości, model ten jest zupełnie nieprzydatny. Rozważymy tu model matematyczny wykorzystujący transformacje Parka dla obwodów stojana i Clarka dla obwodów wirnika.
Funkcja potencjału kinetycznego dla maszyny indukcyjnej trójfazowej ma postać:
/=i J=i
Po podstawieniu powyższej funkcji do równań Lagrange’a drugiego rodzaju otrzymuje się:
|
r Mx\ |
m12 |
Mn |
mM |
mM |
^,6^)1 |
rRs |
0 |
0 |
0 |
0 |
°tv |
[ | |
|
M2l |
Mn |
mM |
mM |
<i |
° |
R, |
0 |
0 |
0 |
0 r | |||
|
| My. |
Mn |
My., |
m,M |
m,M |
m3M |
h 1 |
|J 0 |
0 |
R, |
0 |
0 |
0 r | |
|
Mjp) |
mM |
mąa |
MiS |
Mi6 |
h\ |
+! ° |
0 |
0 |
Ru, |
0 |
0 L | ||
|
UM(d) |
mM |
mJó) |
Ms< |
Ms 5 |
m56 |
u |
! o |
0 |
0 |
0 |
Ru. |
0 b | |
|
[M(M |
mM |
mM |
MM |
M6f |
M(,(, . |
ki |
[o |
0 |
0 |
0 |
0 |
*JbJ |
(15.10)
lub w postaci hipermacierzowej:
d\ M„ . f* OlfiJ fuj
|
qr*-i | |
|
+1 | |
|
jL'*j |
(15.1 la)
d ^ _ I \jT -T1 ^ 1 ^i5 JW\-/j] ff I _ rp
dt2 ~lls
(15.1 lb)
Wykorzystując właściwości macierzy, równanie (15.1 lb) można zapisać w postaci:
(15.12)
W warunkach daleko idących założeń upraszczających elementy poszczególnych macierzy mają postać [5]:
|
_i l |
-K 1 | ||
|
1! s £ |
Las + W |
-K | |
|
L-k |
~lW |
Au + A> j |
i Aw \nwsdJ^, -2nwsW I
— i ~2Ajw "b ^raA1 ~~2™wsd-Jy I
|
i -j-n2 l |
~2nlaW 1 |
|
I COS^tf) |
COs(pi3--j7ty |
|
cos(pt5-|tt) |
1 cos(pi3-) |
|
1 COS^d-yTt) |
1 COs(/?$--j7Cy |
|
rt, = |
KWNW |
|
KsNs |
COs(p£" 3 71 cos(/>^
gdzie:
i
Las - indukcyjność rozproszenia uzwojenia stojana, Z,ait, - indukcyjność rozproszenia uzwojenia wirnika, L^ - indukcyjność główna uzwojenia stojana, kuw - współczynnik uzwojenia wirnika,
m
Wyszukiwarka