48
88 A.S. Jugicłlo, tyliśmy §Mnrom0eMffft(ctn* dla elektryków
[las + /J“ + Lm + u)l„ t l.m /|'t I t- K, Ii - V3 Uph cos(^ - /^) (10 8a)
ta,+/+u~~+/4ta,+u)id+u ra]+Rsiq = &Upi,sm(<nr-/ta (io.8b)
dt dt
{V^Ln)—^+Lm-~-+ K ^a = ° (10.8c)
, sd In d
{Uw+Lm)-£ + Lm-£+ K 'p = 0 (10.8d)
M
(s)-
r“ sin
!
[ L J
gdzie D, i Df to współczynniki dyssypacji - odpowiednio - tłoka wewnątrz cylindra i łożysk silnika.
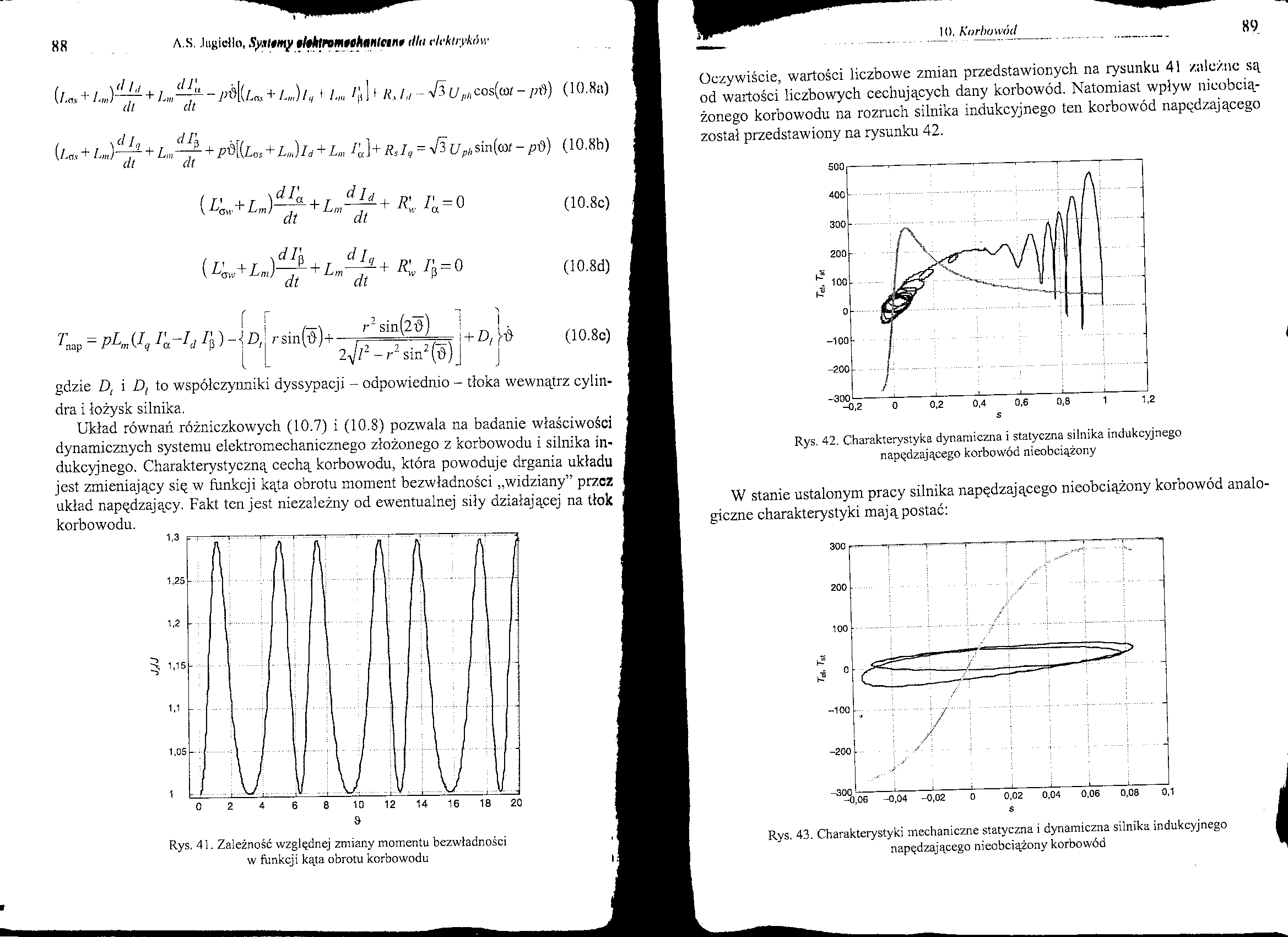
Układ równań różniczkowych (10.7) i (10.8) pozwala na badanie właściwości dynamicznych systemu elektromechanicznego złożonego z korbowodu i silnika indukcyjnego. Charakterystyczną cechą korbowodu, która powoduje drgania układu jest zmieniający się w funkcji kąta obrotu moment bezwładności „widziany” przez układ napędzający. Fakt ten jest niezależny od ewentualnej siły działającej na tłok korbowodu.
rsin
(10.8c)
Rys. 41. Zależność względnej zmiany momentu bezwładności w funkcji kąta obrotu korbowodu
Oczywiście, wartości liczbowe zmian przedstawionych na rysunku 41 zależne są od wartości liczbowych cechujących dany korbowód. Natomiast wpływ nieobcią-żonego korbowodu na rozruch, silnika indukcyjnego ten korbowód napędzającego został przedstawiony na rysunku 42.
Rys. 42. Charakterystyka dynamiczna i statyczna silnika indukcyjnego napędzającego korbowód nieobciążony
W stanie ustalonym pracy silnika napędzającego nieobciążony korbowód analogiczne charakterystyki mają postać:
Rys. 43. Charakterystyki mechaniczne statyczna i dynamiczna silnika indukcyjnego
napędzającego nieobciążony korbowód
Wyszukiwarka