4
Załącznik 1.
Opis budowy i działania mechanizmu sterowniczego urządzenia do sortowania
butelek

|
soQ |
S10 K |
|
START |
STOP |
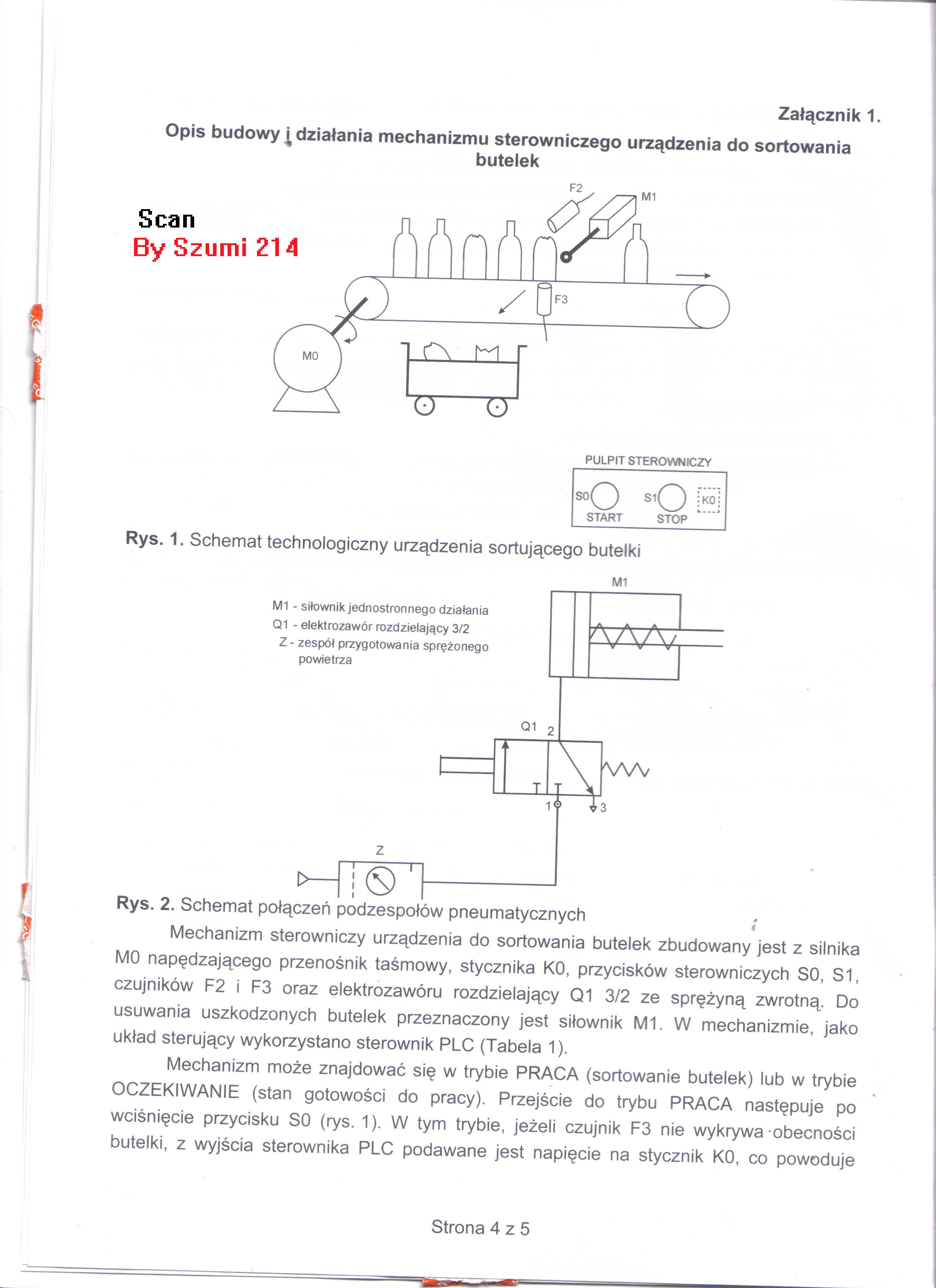
Rys. 1. Schemat technologiczny urządzenia sortującego butelki
M1

Rys. 2. Schemat połączeń podzespołów pneumatycznych -
Mechanizm sterowniczy urządzenia do sortowania butelek zbudowany jest z silnika MO napędzającego przenośnik taśmowy, stycznika KO, przycisków sterowniczych SO, S1, czujników F2 i F3 oraz elektrozaworu rozdzielający Q1 3/2 ze sprężyną zwrotną. Do usuwania uszkodzonych butelek przeznaczony jest siłownik M1. W mechanizmie, jako układ sterujący wykorzystano sterownik PLC (Tabela 1).
Mechanizm może znajdować się w trybie PRACA (sortowanie butelek) lub w trybie OCZEKIWANIE (stan gotowości do pracy). Przejście do trybu PRACA następuje po wciśnięcie przycisku SO (rys. 1). W tym trybie, jeżeli czujnik F3 nie wykrywa obecności butelki, z wyjścia sterownika PLC podawane jest napięcie na stycznik KO, co powoduje
Strona 4 z 5
Wyszukiwarka