slide0166 image747
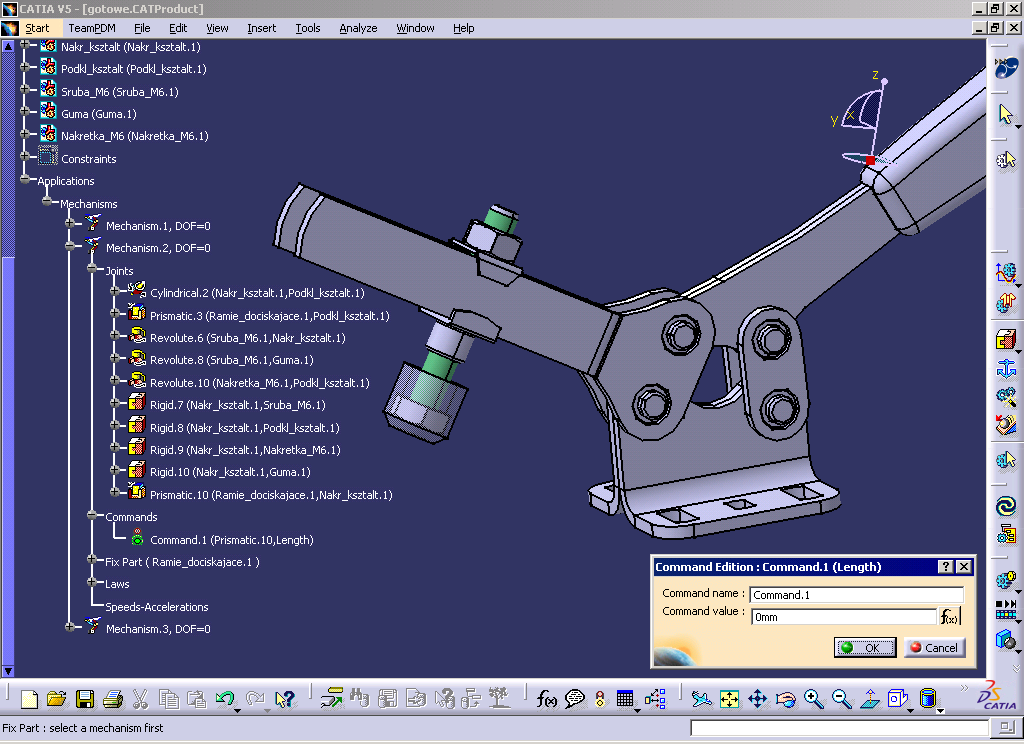
0CATIA V5 - [gotowe.CATProduct]
ET
ET Nakr_ksztalt (Nakr.ksztalt. 1)
I £&) PodkJ_ksztalt (PodkJ_ksztalt.l)
I ii&) Sruba_M6 (Sruba_M6.1)
. “Sńl Guma (Guma. 1)
L^“Sń] Nakretka_M6 (Nakretka_M6.1) lip - y| Constraints ^Applications
Mechanisms
V Mechanism.l, DOF=0
L
Mechanism.2, DOF=0 J
Start TeamPDM File Edit View Insert lools Ąnalyze Window Help

ioints
L
a Cylindrical.2 (Nakr_ksztalt.l,PodkJ_ksztalt.l)
eu
L
£
L
. IN Prismatic. 3 (Ramie_dociskajace. 1, PodkJ_ksztalt. 1) Revolute.6 (Sruba_M6.1,Nakr_ksztalt.l)
■Revolute.8 (Sruba_M6.1,Guma.l)
Revolute. 10 (Nakretka_M6. l,PodkJ_ksztalt. 1)
Ei Rigid. 7 (Nakr_ksztalt. 1, Sruba_M6.1)
Rigid.8 (Nakr_ksztalt. l,PodkJ_ksztalt. 1)
Rigid. 9 (Nakr_ksztalt. l,Nakretka_M6.1)
Rigid. 10 (Nakr_ksztalt. l,Guma. 1)
Prismatic. 10 (Ramie_dociskajace. l,Nakr_ksztalt. 1) Commands
L -
£•> Command.l (Prismatic. 10, Length)
Fix Part (Ramie_dociskajace.l)
Laws
l
L
L
L

Speeds-Accelerations
. .ę-r
i Mechanism.3, DOF=0

Fix Part: select a mechanism First

□ □ □
Wyszukiwarka
Podobne podstrony:
slide0163 image731 0CATIA V5 - [gotowe.CATProduct] ET ET Nakr_ksztalt (Nakr.ksztalt. 1) I £&) Po
slide0167 image751 [a]CATIA V5 - [gotowe.CATProduct] T D 9“ fi$j Nakr_ks2talt (Nakr_ksztalt.l) PodkJ
slide0074 image339 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0076 image347 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0077 image351 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0078 image356 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0086 image393 0CATIA V5 - [gotowe.CATProduct] X P Start TeamPDM File Edit View Insert lools Ana
slide0089 image408 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0096 image441 0CATIA V5 - [gotowe.CATProduct] TeamPDM File Edit View Insert lools Ąnalyze Windo
slide0102 image466 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0106 image486 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0109 image501 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert Podstawa (Pod
slide0115 image531 0CATIA V5 - [gotowe.CATProduct] l!1 Start TeamPDM File Edit View Insert lools Ąna
slide0117 image541 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0133 image471 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0149 image669 0CATIA V5 - [gotowe.CATProduct]IMEJ Cl Start TeamPDM File Edit View Insert lools
slide0157 image704 [TJcaTIA V5 - [gotowe.CATProduct] 1] Start TeamPDM File Edit View Insert lools An
slide0158 image709 [%]CATIA V5 - [gotowe.CATProduct]- 8 x
więcej podobnych podstron