slide0176 image792
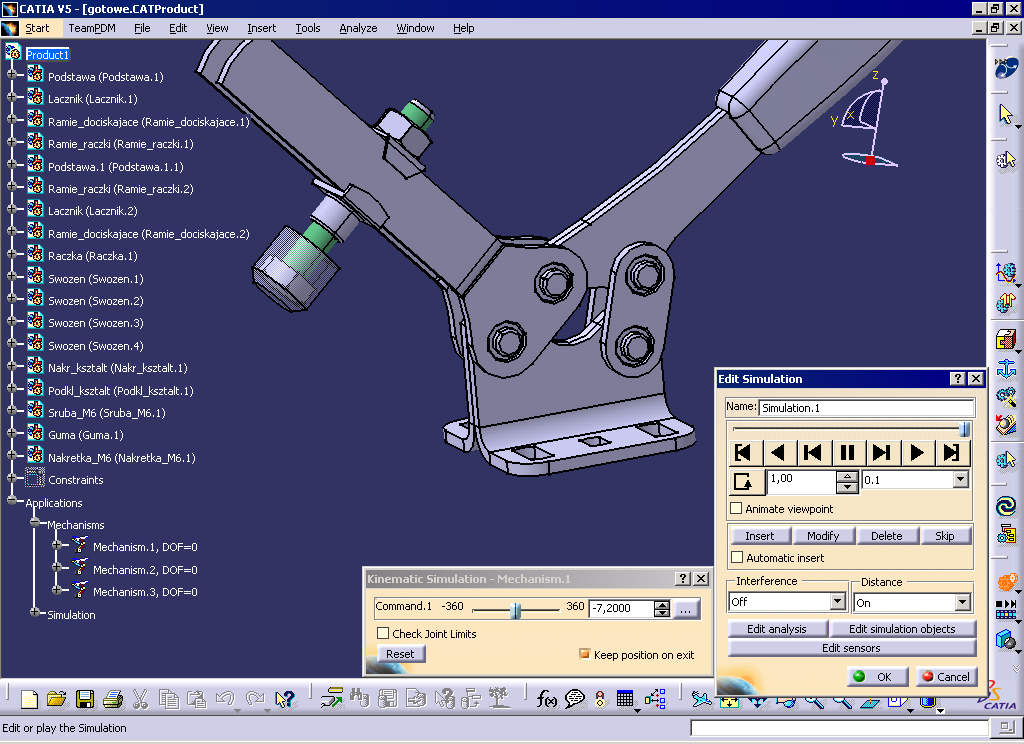
|5| C ATI A V5 - [gotowe.CATProduct]
□ Start TeamPDM File Edit View Insert lools Ąnalyze Window Help
flp! Pródućtl
.“*&) Podstawa (Podstawa. 1)
I -------------%■ —
. - iń] Łącznik (Łącznik. 1) lilia
r~ ŁOj Ramie_dociskajace (Ramie_dociskajace.l) i S&) Ramie_raczki (Ramie_raczki.l)
I 6&) Podstawa. 1 (Podstawa. 1.1)
, £&) Ramie_raczki (Ramie_raczki.2)
— Łącznik (Łącznik. 2)
, ŁOj Ramie dociskające (Ramie dociskające.2)
♦
. I NsJI III*-- \
I m Raczka (Raczka. 1) r~ m Swozen (Swozen.l) i &&) Swozen (Swozen.2)
6$*] Swozen (Swozen.3)
RS
. fi&l Swozen (Swozen.4)
Y" Nakr.ksztalt (Nakr_ksztalt.l)
I 6^1 Podkl_ksztalt (Podkl_ksżtalt.l) h-W Sruba_M6(Sruba_M6.1)
I ń&3 Guma (Guma. 1)
. — Ćófi Nakretka_M6 (Nakre
1 igi
Constraints ^“Applications Y”Mechanisms
Ipchanisms
I V Mechanism.l, DOF=0 . “ Y Mechanism.2, DOF=0
Mechanism.3, DOF=0
Simulation
Ramie_dociska jace (Ramie_dociska jace. 2) Raczka (Raczka. 1)

r
i

Kinematic Simulation - Mechanism.l
Command.l -360
360
-7,2000
0.1
3
Insert Modify Delete Skip
□ Automatic insert
|
Interference |
Distance |
|
off zi |
On |
□ Check Joint Limits Reset
Keep position on exit
Edit analysis | Edit simulation objects _Edit sensors |
£ OK

Edit or play the Simulation
▼ *D
Wyszukiwarka
Podobne podstrony:
slide0094 image432
slide0190 image856
slide0087 image398 [3]CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąna
slide0093 image428 [V]CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ana
slide0078 image356 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0097 image445 gJCATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnal
slide0098 image449 [>
slide0102 image466 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0107 image491 (TjCATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąna
slide0116 image536 [>
slide0117 image541 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0133 image471 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0171 image768 5]CATIA V5 - [gotowe.CATProduct] -Iff x Start TeamPDM File Edit View Insert lools
slide0181 image816 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0202 image911 0CATIA V5 - [gotowe.CATProduct] □ Start TeamPDM File Edit View Insert lools Ąnaly
slide0074 image339 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0077 image351 0CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools Ąnal
slide0178 image803 (a]CATIA V5 - [gotowe.CATProduct] Cl Start TeamPDM File Edit View Insert lools An
więcej podobnych podstron