slide0177 image797
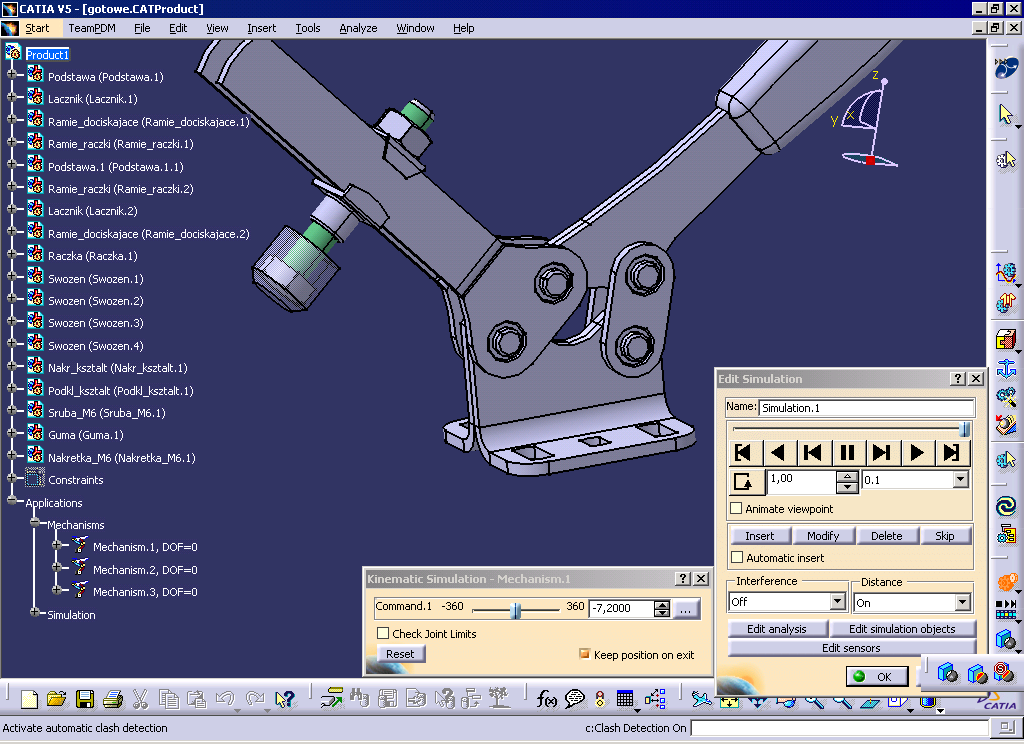
gjCATIA V5 - [gotowe.CATProduct]
P Start TeamPDM File Edit View Insert lools Ąnaly2e Window Help
Fodućtl
Podstawa (Podstawa. 1)
£gj Lac2nik (Lac2nik. 1)
— 6$ Ramie_dociskajace (Ramie_dociskajace.l) i Ramie_rac2kj (Ramie_rac2ki.l)
I 6^3 Podstawa. 1 (Podstawa. 1.1)
JL HA
c ■ &?5j Ramie_rac2kj (Ramie_rac2ki.2) Lac2nik(Lac2nik.2)
JL £S
I SlSj Ramie_dociskajace (Ramie_dociskajace.2) I &&) Rac2ka (Rac2ka. 1)
Y“ HM Swo2en (Swo2en.l) i fiS Swo2en (Swo2en.2) i fiśs) Swo2en (Swo2en.3)
I ii&) Swo2en (Swo2en.4)
I Nakr_ks2talt (Nakr_ks2talt.l)
I sń) Podkl_ks2talt (PodkJ_ks2talt.l) y-£&) Sruba_M6 (Sruba_M6.1)
Y” a?s) Guma (Guma. 1)
y-ft&l Nakretka_M6 (Nakretka_M6.1)
I . Constraints Applications 1 Mechanisms
? Mechanism.l, DOF=0 . “ V Mechanism.2, DOF=0 V Mechanism.3, DOF=0 Simulation
♦

W
Kinematic Simulation - Mechanism.l
Command.l -360
360
-7,2000
|
H |
◄ |
W |
ll |
H |
► |
W |
|
D |
1 i.oo |
3.1 |
▼ | |||
|
□ Animate viewpoint | ||||||
|
Insert |
Modify |
Delete |
Skip | |||
|
| □ Automatic |
insert |
_1 | ||||
Edit analysis | Edit simulation objects _Edit sensors_
"J ra
|
Interference |
Distance |
|
[óff 3 |
l°n 3 |
3 OK 1
O Check Joint Limits Reset
'-i Keep position on exit

Activate automatic dash detection c:Clash Detection On EJ
Wyszukiwarka
Podobne podstrony:
slide0071 image326 gjCATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyz
slide0152 image681 gjCATIA V5 - [gotowe.CATProduct] n Start TeamPDM File Edit View Insert lools Anal
slide0157 image704 [TJcaTIA V5 - [gotowe.CATProduct] 1] Start TeamPDM File Edit View Insert lools An
slide0158 image709 [%]CATIA V5 - [gotowe.CATProduct]- 8 x
slide0175 image788 (TjCATIA V5 - [gotowe.CATProduct] a Start TeamPDM File Edit View Insert lools Ąna
slide0159 image713 (TJcATIA V5 - [gotowe.CATProduct] n Start TearnPDM File Edit View Insert lools Ąn
slide0072 image330 (a]CATIA V5 - [gotowe.CATProduct] l!1 Start TeamPDM File Edit View Insert lools Ą
slide0075 image343 (a]CATIA V5 - [gotowe.CATProduct] l!1 Start TeamPDM File Edit View Insert lools Ą
slide0081 image370
slide0082 image374
slide0083 image379
slide0086 image393 0CATIA V5 - [gotowe.CATProduct] X P Start TeamPDM File Edit View Insert lools Ana
slide0088 image403 ^]CATIA V5 - [gotowe.CATProduct] P Start TeamPDM File Edit View Insert lools Ąnal
slide0100 image457 [3]CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnaly
slide0105 image482 (a]CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Analy
slide0110 image506 gCATIA V5 - [gotowe.CATProduct]F* Start TeamPDM File Edit View Insert lools Analy
slide0112 image516
slide0114 image526 [3]CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnaly
więcej podobnych podstron