slide0199 image897
Start TeamPDM File Edit View Insert lools Ąnalyze Window Help
P Pródućtl
Śfcśj Podstawa (Podstawa. 1)
&&) Łącznik (Łącznik. 1)
S&j Ramie_dociskajace (Ramie_dociskajace.l) S<5 Ramie_raczki (Ramie_raczki.l) iiuj] Podstawa. 1 (Podstawa. 1.1) ,/j Rarnie_raczkj (Ramie_rac2kj.2)
6$] Łącznik (Łącznik.2)
tuj] Ramie_dociskajace (Ramie_dociskajace.2) 15 Raczka (Raczka. 1)
ŁSj Swozen (Swozen.l) i&2 Swozen (Swozen.2)
Sj5 Swozen (Swozen.3)
ŁSJ Swozen (Swozen.4)
6$*] Nakr_ksztalt (Nakr_ksztalt.l)
£<5 PodkJ_ksztalt (PodkJ_ksztalt.l) fól Sruba_M6 (Sruba_M6.1) ft«5 Guma (Guma. 1) isś5 Nakretka_M6 (Nakretka_M6.1)
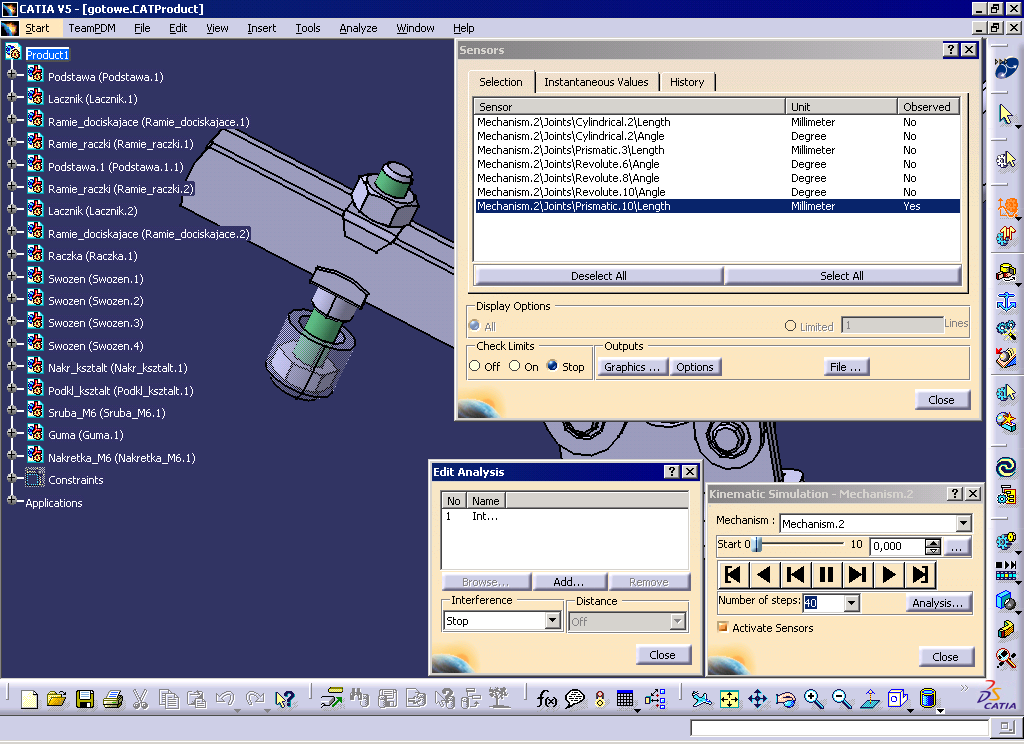
Selection | Instantaneous Values | History |
Sensor
Unit
Observed
Mechanism. 2\ Joints\Cylindrical. 2\Length Mechanism. 2\ Joints\Cylindrical. 2\Angle Mechanism. 2\ Joints\Prismatic. 3\Length Mechanism. 2\ Joints\Revolute. 6\Angle Mechanism. 2\ Joints\Revolute. 3\Angle Mechanism. 2\Joints\Revolute. 10\ Angle
i Mechanism. 2\ Joints\Prisrnatic. 10\Length
-Display Options
$ Ali
Millimeter
Degree
Millimeter
Degree
Degree
Degree
Millimeter
Yes
Deselect Ali
Select Ali
O Limited P"
Lines
-][■ Outputs Graphics
Options
M
Constraints
■Applications

No
Name
1 Int...
Browse...
Interference
Distance
Mechanism :
.U _*!
Mechanism. 2
Stop
Off
Rernoye
Number of steps: *Jj]
Analysis


Q Activate Sensors


Close

Wyszukiwarka
Podobne podstrony:
slide0185 image833
slide0188 image847
slide0081 image370
slide0083 image379
slide0112 image516
slide0128 image595
slide0129 image600
slide0144 image648 [a] C ATI A V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąn
slide0180 image811 (aJcATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnaly
slide0186 image838 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyze
slide0187 image842 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyze
slide0189 image851 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyze
slide0192 image865 5]CATIA V5 - [gotowe.CATProduct] ” Start TeamPDM File Edit View Insert lools Ąnal
slide0193 image870 [T]CATIA V5 - [gotowe.CATProduct] a Start TeamPDM File Edit View Insert lools Ąna
slide0194 image874 [3]CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnaly
slide0196 image884 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyze
slide0197 image888 0CATIA V5 - [gotowe.CATProduct] Start TeamPDM File Edit View Insert lools Ąnalyze
slide0082 image374
więcej podobnych podstron