skanuj0024 (13)
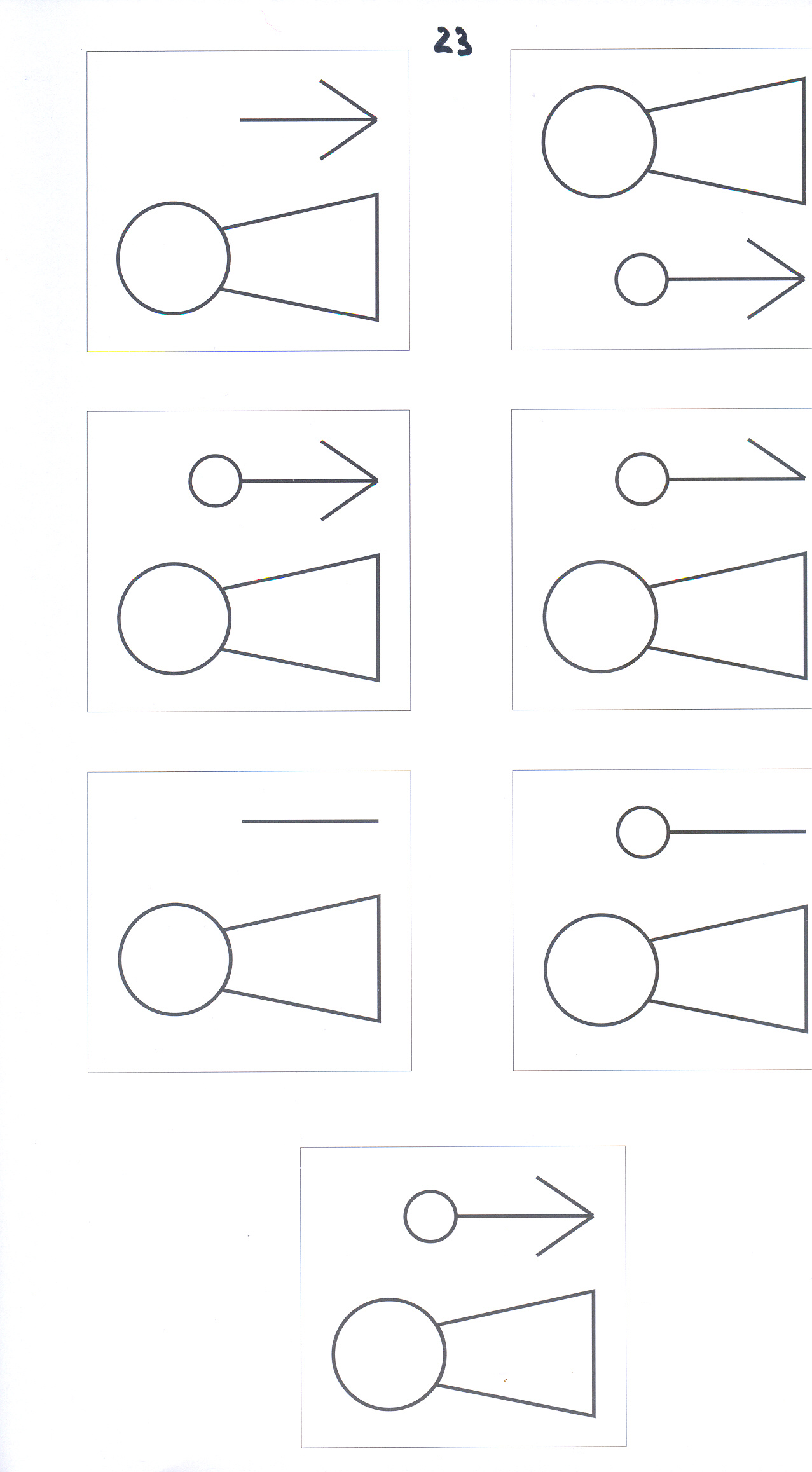
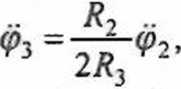
Dla ciał 2 i 3
Dla ciał 3 i 4.
(D-18.57)
(D-18.58)
Równanie ruchu ciała 2
Ponieważ interesuje nas równanie ruchu ciała 2, wyraźmy nieznane wielkości x{,(p3,x4 przez (p2. Korzystając ze związków geometrycznych (D-18.56) do (D-18.58), otrzymamy
=r2<Pi>
*4 = (R1 + r3 )<P3 = (*3 + r3 )^-<P2 •
(D-18.59)
Po uwzględnieniu zależności (D-18.59) w równaniach (D-18.5), (D-18.5), (D-18.5) i (D-l 8.55) otrzymamy układ równań
ml r2 $2 ~ R°2 “ R12 > (D-l 8.60)
'”4(R3+'-3h£r<P2=S43-S4°3, (D-18.61)
zk3

= -G3R3 sin 10° - G3f cos 10° - S3A (R3 + r3) + S23 2/?3,
2 • R3
(D-l 8.62)
/^<p2 =M+S2lr2-S2iR2. (D-l 8.63)
Z równań (D-18.60)-(D-18.62) otrzymamy
sn=S2i=SZ\~'»lr2$2> (D-l 8.64)
231
Wyszukiwarka
Podobne podstrony:
skanuj0110 (24) 122 PHP i MySQL dla każdego ♦ prev — Przesuwa wskaźnik tablic na p
skanuj0266 (3) 280 PHP i MySQL dla każdego ♦ DCL, język kontroli danych (ang. Data Control Language)
więcej podobnych podstron