P1080247
5. Sterowanie robotów przemysłowych
prędkości w każdym punkcie trajektorii ruchu. Interpolatorem jest specjalizowa- ] ny 32-bitowy procesor DSP, dokonujący bardzo szybkich obliczeń matematycznych. Generuje on sygnały reprezentujące wartość przemieszczenia dla każdej osi osobno. W układach mniej skomplikowanych, o małej liczbie sterowanych osi algorytm interpolacji jest wykonywany przez procesor główny. Geometryczna suma przemieszczeń tworzy tor narzędzia zgodnie z zaprogramowanym torem jego mchu.
Sterownik napędów serwomechanizmowych (73) służy do sterowania ru- I chami w poszczególnych osiach. Sterownik przyjmuje z jednostki centralnej lub I z wyspecjalizowanego procesora spełniającego funkcję interpolatora (12) infor- I macje o generowanych przyrostach przemieszczeń, jakie mają być wykonane. I Drugą informacją wejściową jest sygnał rzeczywistego (istniejącego) przemiesz- I czenia zespołu przesuwnego, który otrzymuje się z układu pomiarowego prze- I mieszczenia. Zadaniem sterownika położenia osi jest obliczenie rzeczywistego I błędu położenia. W układzie sterowania może znajdować się od 2 do 8 sterowni- I ków serwonapędów, zależnie od liczby sterowanych osi. Podobną funkcję spełnia I sterownik napędów z silnikami skokowymi (14).
Obwody wejścia/wyjścia
Pakiet wejść i wyjść dwustanowych (9) i analogowych (10). Wejścia i wyjścia binarne i analogowe są modułami sterownika PLC i były omówione w p. 5.4. Najnowocześniejsze układy zawierają obecnie nawet do kilkuset wejść i wyjść cyfrowych i są stosowane w układach sterowania tych robotów, w których jeden układ steruje pracą robota i kilku współpracujących urządzeń.
Interfejs komunikacji z innymi komputerami lub układami sterowania (5) jest stosowany w przypadku konieczności komunikacji przez sieć komputerową z urządzeniami zewnętrznymi (komputerem nadrzędnym, układem sterowania współpracującej maszyny itp.). Moduł sterownika sieci lokalnej jest przewidywany przede wszystkim do zastosowania w elastycznych systemach produkcyjnych lub wówczas, gdy jest wymagana np. inicjacja pracy albo zewnętrzne programowanie autonomicznych stanowisk produkcyjnych.
Interfejs użytkownika
Jest on umieszczony na zewnętrznej płycie układu sterowania. Wyposaża się go w przyciski, dzięki którym można: załączyć i wyłączyć urządzenie, przełączać tryby pracy robota, zresetować go, włączyć awaryjne zatrzymanie, włączać funkcje zaprogramowane przez użytkowników; widoczny jest również licznik godzin pracy robota.
Programator ręczny
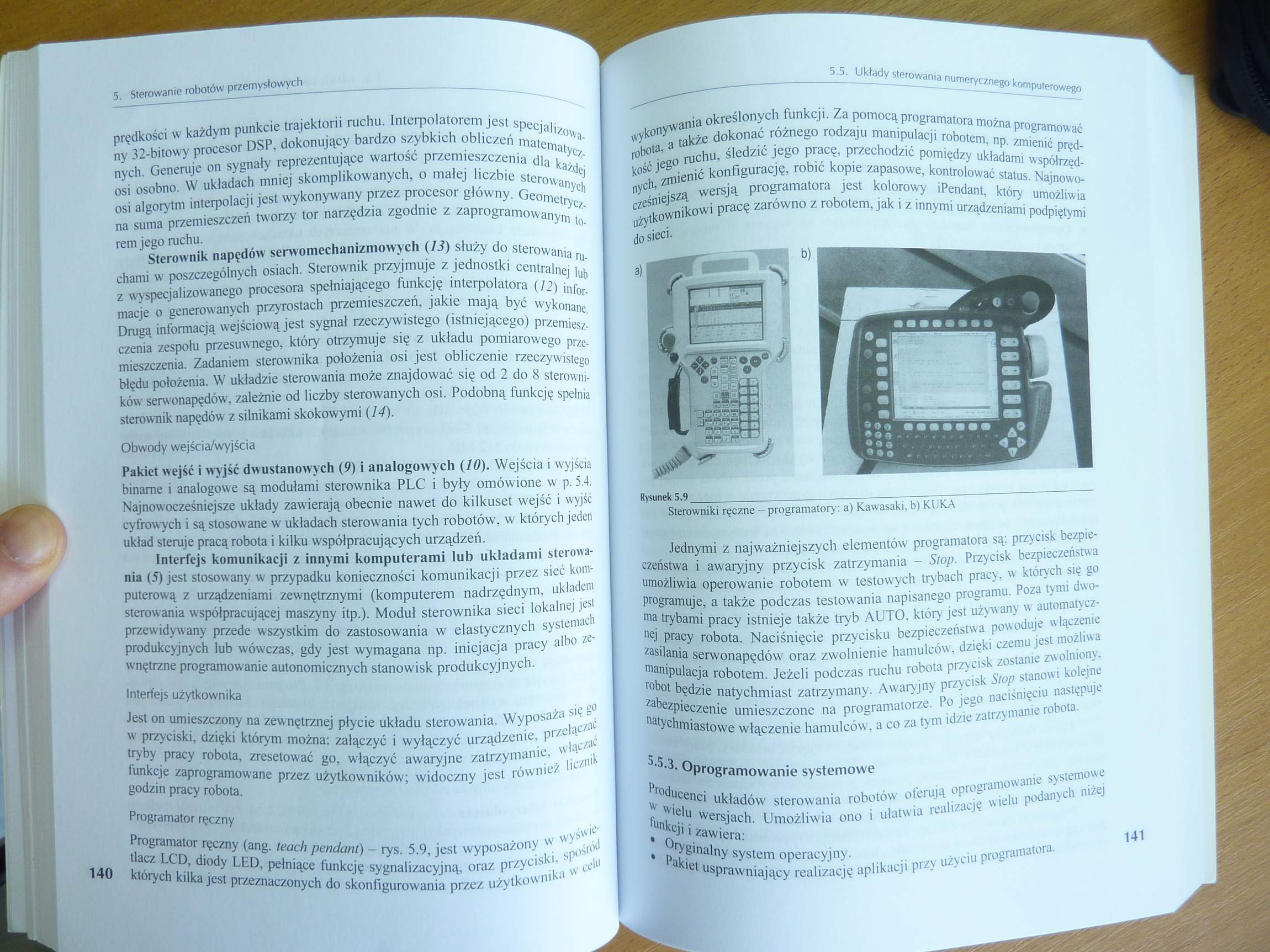
Programator ręczny (ang. teach pendant) - rys. 5.9, jest wyposażony w wyświetlacz LCD, diody LED, pełniące funkcję sygnalizacyjną, oraz przyciski, spośród 140 których kilka jest przeznaczonych do skonfigurowania przez użytkownika w celu
wykonywania określonych funkcji. Za pomocą programatora można programować robota, a także dokonać różnego rodzaju manipulacji robotem, np. zmienić prędkość jego ruchu, śledzić jego pracę, przechodzić pomiędzy układami współrzędnych, zmienić konfigurację, robić kopie zapasowe, kontrolować status. Najnowocześniejszą wersją programatora jest kolorowy iPendant, który umożliwia użytkownikowi pracę zarówno z robotem, jak i z innymi urządzeniami podpiętymi do sieci.
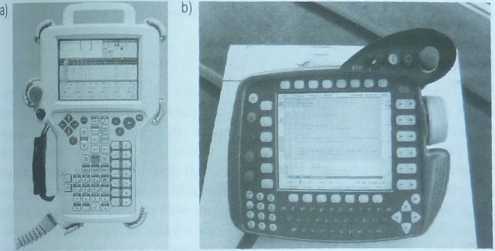
Rysunek ^_
Sterowniki ręczne-programatory: a) Kawasaki, b) KUKA
Jednymi z najważniejszych elementów programatora są: przycisk bezpieczeństwa i awaryjny przycisk zatrzymania - Stop. Przycisk bezpieczeństwa umożliwią operowanie robotem w testowych trybach pracy, w których się go programuje, a także podczas testowania napisanego programu. Poza tymi dwoma trybami pracy istnieje także tryb AUTO, który jest używany w automatycznej pracy robota. ^Naciśnięcie przycisku bezpieczeństwa powoduje włączenie zasilanją ęęrwonapędów oraz zwolnienie hamulców, dzięki czemu jest możliwa manipulacja robotem. Jeżeli podczas ruchu robota przycisk zostanie zwolniony, robot będzie Natychmiast zatrzymany. Awaryjny przycisk Stop stanowi kolejne zabezpieczenie umieszczone na programatorze. Po jego naciśnięciu następuje natychmiastowe włączenie hamulców, a co za tym idzie zatrzymanie robota.
5.5.3. Oprogramowanie systemowe
Producenci układów sterowania robotów oferują oprogramowanie systemowe w wielu wersjach. Umożliwia ono i ułatwia realizację wielu podanych niżej funkcji i zawiera:
• Oryginalny system operacyjny.
• Pakiet usprawniający realizację aplikacji przy użyciu programatora.
141
Wyszukiwarka
Podobne podstrony:
P1080240 5. Sterowanie robotów przemysłowych wymagać także pewne wielkości, na które robot nie ma be
79631 P1080244 5. Sterowanie robotów przemysłowych we, regulację PID oraz funkcje sterowania silniki
55128 P1080239 5. Sterowanie robotów przemysłowych hiperbola, elipsa). Przeznaczona jest szczególnie
więcej podobnych podstron