skanuj0010 (282)

to wyznaczyć kolejno 2frU, 3JO, 4JU. znajomość tych Aioiikftw obrotu umożliwia sporządzenie planu przemieszczeń obróconych (pełnego planu pokazanego na rysunku).
Z lokalizacji środków wynika, że tarcza 1 jest nieruchoma. Nadając możliwe przemieszczenie obrócone punktowi A (AA") i wykorzystując twierdzenia o ruchu płaskim dla tarcz, kolejno można wyznaczyć BB", CC", DD", HE" i FF"! Więź podporowa R (przerywana), ze względu na swój kierunek uniemożliwia realizację przemieszczenia FF" (możliwe przemieszczenie obrócono to przesunięcie poziome). Otrzymujemy zatem sprzeczność w możliwości ruchu punktu F; świadczy to o geometrycznej niezmienności schematu.
Nic jest to jedyny wariant dowodu geometrycznej niezmienności schematu przy tym podejściu, możliwe bowiem jest myślowe usunięcie innej więzi, podporowej lub wewnętrznej. Wniosek końcowy jest następujący: wobec zachowanego kryterium jakościowego geometrycznej niezmienności i spełnionego warunku ilościowego — układ jest statycznie wyznaczałny (izostatyczny).
Geometryczną niezmienność układu (po sprawdzeniu warunku ilościowego) można zbadać metodą analityczną. W tym celu dzielimy układ na zbiór tarcz izolowanych (4 tarcze, a w miejsce usuniętych więzi przyjmujemy stosowne niewiadome reakcje — R> H, Vt W i interakcje (siły wewnętrzne) — T, N, Z, M, S, 17, K, F.
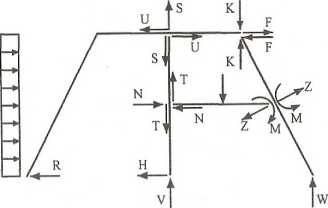
Dla każdej tarczy możemy napisać 3 klasyczne (lub wariantowe) równania równowagi Otrzymujemy zatem układ 12 równań o 12 niewiadomych.
W celu zbadania geometrycznej niezmienności układu badamy wyznacznik przy niewiadomych.
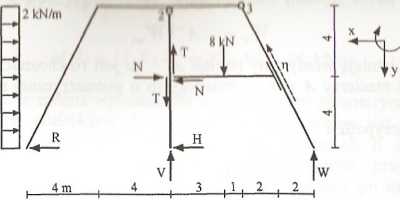
Rozmiar zadania można zmniejszyć rozważając poniższy schemat obliczeniowy (jeden z możliwych).
Należy zwrócić uwagę, że w zadaniu tym nie ma możliwości niezależnego wyznaczenia wszystkich reakcji.
Należy je wyznaczyć łącznie z grupą interakcji (w tym przypadku T, N; po otwarciu komory otrzymujemy graf otwarty, co bardzo ułatwia obliczanie sił wewnętrznych) wykorzystując trzy warunki równowagi oraz 3 warunki konstrukcyjne:
guma rzutów wszystkich sil na oś X równa się zero (ZX = 0)
R+H-2-8 = 0,
suma rzutów wszystkich sił na oś Y równa się zero (£7 = 0)
V+W- 8 = 0,
Numa momentów wszystkich sił względem bieguna i równa się zero (£Af t m 0) 87+2*8*4—8*5 = 0,
siła w kierunku osi rj równa się zero (Pn = 0)
T-2/t/Ś+N- 1/V5-8-2/Vs = 0, moment gnący w punkcie 2 równa się zero (Af2 = 0)
H'S—N’4 = 0,
moment gnący w punkcie 3 równa się zero (Af3 = 0)
- W-4+T-4+N-4S-1 = 0.
Macierzowy zapis układu równań ma postać A-W„+Ww = G,
gdzie
- wektor niewiadomych W„ = (R, H, V, W, T, N)T,
8’24’-^’0-

-(■
wektor wyrazów wolnych Wy
16,
|
macierz współczynników |
przy niewiadomych | ||||
|
'l 1 |
0 |
0 |
0 |
0 | |
|
0 0 |
1 |
1 |
0 |
0 | |
|
0 0 |
8 |
0 |
0 |
0 | |
|
A — |
0 0 |
0 |
0 |
2/y/5 |
1A/5 |
|
0 0 |
0 |
0 |
0 |
-4 | |
|
.0 0 |
0 |
-4 |
4 |
4 | |
41
Wyszukiwarka
Podobne podstrony:
skanuj0273 282 Najważniejsze znaczenie ma podział płac według ich rodzaju. Uwzględniając to kryteriu
skanuj0273 282 Najważniejsze znaczenie ma podział płac według ich rodzaju. Uwzględniając to kryteriu
44109 skanuj0003 (119) Młyny, wytrząsarki, kolejność robienia pudrów.. co to jest krwawienie lakieru
skanuj0011 (282) .4 1 ^. .-Metody i formy nauczania i wychowania w klasach I-III. 1 crniin „mcloiła
więcej podobnych podstron