skanuj0412 (2)

Wycięcia w krzyżu o promieniu r0 współpracują z tarczą korby o promieniu r w okresach, gdy czop korby jest poza rowkiem i służą do chwilowego unieruchomienia krzyża. Odległość osi a wyznacza się z zależności
R
a =- (16.3)
cos a
, , . 180° w której a =-
z
Liczba rowków z zależy od zadań, jakie spełnia krzyż maltański; najczęściej z = 3 -r- 6.
Krzyż maltański jest stosowany przeważnie w mechanizmach podziałowych, np. do obrotu zespołów wrzecionowych w automatach tokarskich, do obrotu głowic rewolwerowych itp. W zależności od przeznaczenia krzyża maltańskiego korba może pracować ze stałą prędkością obrotową lub też może być uruchamiana okresowo (ręcznie lub mechanicznie), np. dla dokonania obrotu głowicy rewolwerowej.
16.4. Mechanizmy krzywkowe
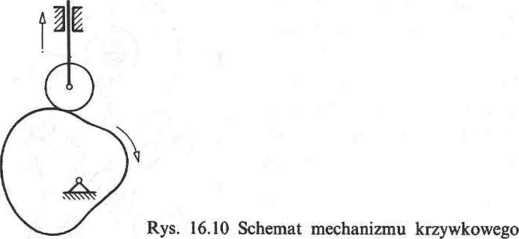
Mechanizm krzywkowy umożliwia otrzymanie dowolnego ruchu elementu napędzanego. Ruch ten zależy głównie od rodzaju ruchu krzywki i jej kształtu. Mechanizm krzywkowy składa się z krzywki i popychacza (rys. 16.10). Kształt krzywki ustala się w zależności od programu pracy mechanizmu krzywkowego, na który składa się:
• rodzaj ruchu krzywki (obrotowy, wahliwy, postępowy),
• rodzaj ruchu popychacza (najczęściej postępowo-zwrotny o zmiennej prędkości, w tym również z możliwością postoju, lub wahadłowy),
• sposób przekazywania ruchu (ruch elementu napędzanego otrzymuje się bezpośrednio od popychacza lub za pośrednictwem mechanizmu dźwigniowego, zębatego itd).
Elementem napędzającym mechanizmu (członem czynnym) jest zwykle krzywka, a członem napędzanym (biernym) — popychać z.
412
Wyszukiwarka
Podobne podstrony:
skanuj0022 4 Dorysuj słońcu promienie i pokoloruj je
skanuj0027 (161) Dopuszczalne promienie krzywizny odgięcia drutów i splotów sprężających, według nor
skanuj0010 Jak powstaje promieniowanie rentgenowskie ? widmo ciągłe i charakterystyczne mechanizm wy
skanuj0022 4 Dorysuj słońcu promienie i pokoloruj je
skanuj0027 (161) Dopuszczalne promienie krzywizny odgięcia drutów i splotów sprężających, według nor
skanuj0264 (4) się wzdłuż zęba i zakończenie współpracy pary zębów następuje wówczas, gćj wierzchołe
skanuj0084 11. Ncnv promieniowy unerwia: wszy s t k i e.pros t o w ni luj ło ń czy
skanuj0116 11. Nerw promieniowy unerwia: (ay wszystkie prostowniki kończyny górnej
skanuj0048 2 57 Różne ozdobySłoneczko 2 średnie kolanka (tarcza słońca) spiralki (promyki) 2 gwiazde
skanuj0178 [1600x1200] Emisja promieniowania przez wzbudzone w atomizerze atomy, cząstki ciał stałyc
skanuj0008 SŁOWNICZEK KOOPERACJA UMOWA O WZAJEMNEJ WSPÓŁPRACY. PRZEDSIĘBIORSTWA REZYGNUJĄ Z NIEKTÓRY
skanuj0003 (110) Zakresy promieniowania rejestrowane przez satelity Landsat . Nazwa satelity Kanał
więcej podobnych podstron