skrypt5
6.3.1
en.T
rir,T
rn.T \
Rys 6.3. Sekcja &{pn+\ j) filtru
Cyfrowa rn.rracja anaptacyjna szeregów czasowych Stąd wniosek, że
k«+i >r=(k« >7 4-jarrt >T p„+ij] < £„k„ >\< Cm-iK+i Wykorzystując tożsamość < <?„+i|en+i >7= I otrzymujemy
I = < £n\en >T< Cn41|*n+1 >T1 [< *nle" >T + < Cn\zrn >T pn+\J +
+ < zr„\en >T p„+\.T+ < zrn\zrn >7 p** ,<7] =
= < Knkn >T< Sfl+ lkn-fl >7' H ~ P«-f I ;7 “ Pn t I;7 + Pn+1 ij)
Mamy więc
^ £nkn ^7 ^ ^n+1 k« + t ^7 ^ = ( ^ Pn+ 1.7) ^ i ostatecznie
|en+| >7 — [ k„ >7 *Hjr« >7 Pnf 1:7 ](1 ""Pnf I;7)~
W analogiczny sposób możemy wyprowadzić zależność (6.48) Właściwość |pnĄ.,;7*| < I jest konsekwencją faktu. iż. współczynnik Schura wyraża się jako iloczyn skalamy unormowanych elementów \en >7 i |rr„ >7 przestrzeni 7/
n
/-ortogonalna realizacja filtru parametryzującego
Wykorzystując (6.10) i (6.11) w (6.47)-(6.48). i obliczając iloczyny skalanie
< ar|en,.| >r=[< *\en >7 + < n\zr„ >7 p„+i;r ](I -pl+\ j)~ł (6.50)
oraz
< arkn+i >r= [ < rr\e„ >rPn+i.r+ < *\zrn >r ](1 -p*+i.r)~* (6.51)
otrzymujemy
*n+ l;7 = kn;7 +r»»;r-IP/>+l:r](> “pi+l-.r)(6.52) oraz
rn+\ J = kn;7Pfi+l;r + r/i;7-l](l ~ Pn+l j)~^ (6 53)
_Adaptacyjna parametryzacja ortogonalna szeregów czasowych
Przepisując (6.52)-(6.53) w postaci macierzowej
[t;;;]-«»-.») te„]
gdzie
0(P»+I:t) = (' -P»+nr)~ł [pllłlTP"+‘^] (655)
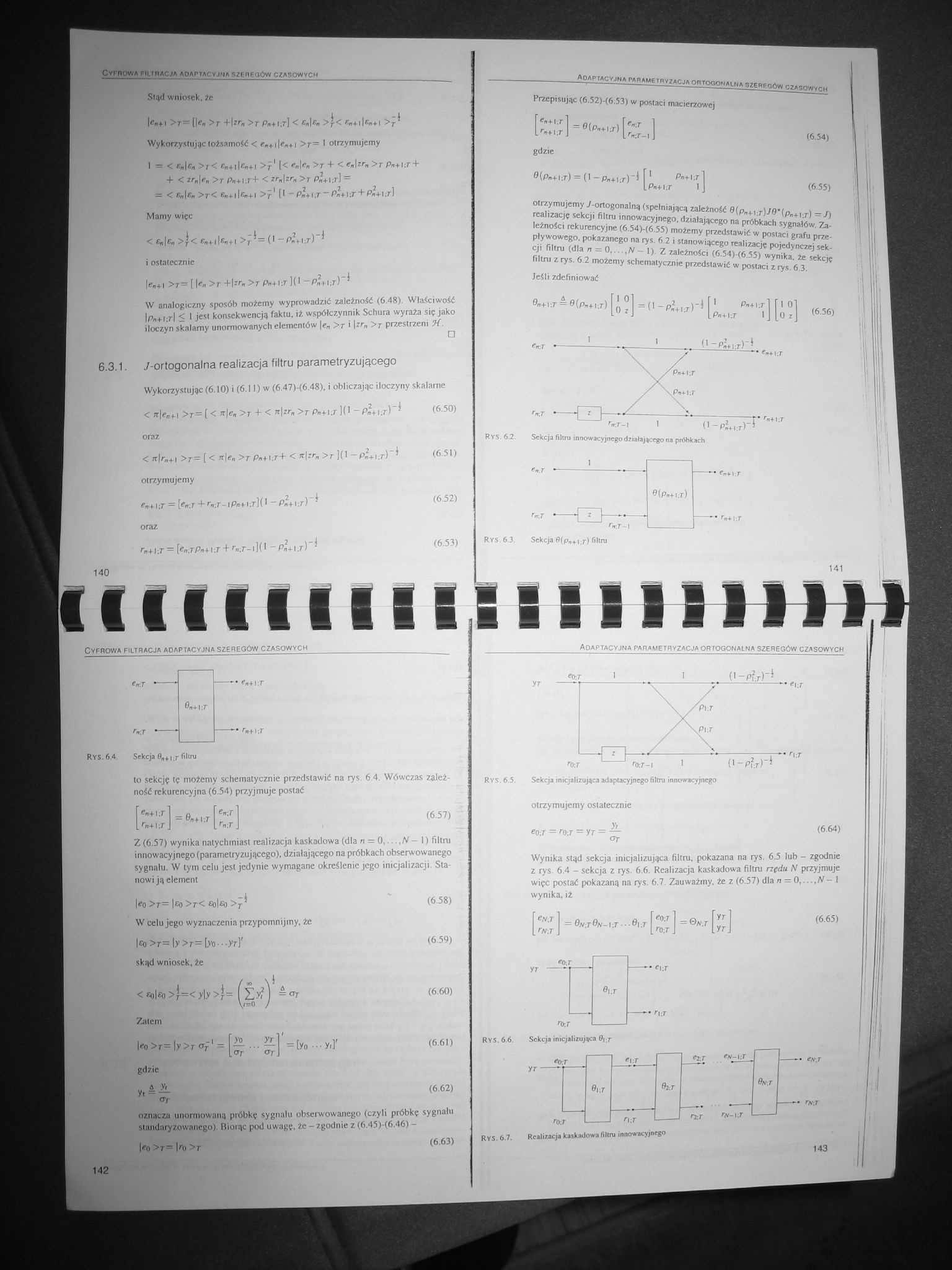
otrzymujemy ./-ortogonalną (spełniającą zależność Q{pn*-\ j)J[pn+\ j) = J) realizację sekcji filtru innowacyjnego, działającego na próbkach sygnałów. Zależności rckurencyjne (6.54)-(6.55) możemy przedstawić w postaci grafu przepływowego. pokazanego na rys. 6.2 i stanowiącego realizację pojedynczej sekcji filtru (dla n = 0... ,N - 1). Z zależności (6.54)-(6.55) wynika, że sekcję filtru z rys. 6 2 możemy schematycznie przedstawić w postaci z rys 6.3.
Jeśli zdefiniować
<w 4 [J J] = 0-P„2+l;,)-i [^+1T [J,°] (6.56)
en+\ T
rn+\.T
140
141
Cyfrowa filtracja aoaptacyjna szeregów czasowych
tn-.T
tnW.T
U.T
Gi+I;r
RYS. 64 Sekcja ;7 filtru
to sekcję tę możemy schematycznie przedstawić na rys 6 4. Wówczas zależność rekurcncyjna (6.54) przyjmuje postać
*n+l;7
rfi+I;7
= ft
>1+1:7
(6.57)
Z (6.57) wynika natychmiast realizacja kaskadowa (dla n = 0.. .N I) filtru innowacyjnego (parametryzującego), działającego na próbkach obserwowanego sygnału. W tym celu jest jedynie wymagane określenie jego inicjalizucji. Sta nowi ją element
|
ko >r= |eo >r< £o|eo >7 ^ |
(6.58) | |
|
W celu jego wyznaczenia przypomnijmy, żc | ||
|
l®0 >r= |y >r = L>*o • • -yr]' skąd wniosek, że <*o|£a>j.=< |
(659) | |
|
A = Gf |
(6.60) | |
|
Zatem | ||
|
ko >7= |y >7 af1 = [— ... — [crr G,\ |
II 'k' o |
(6.61) |
|
gdzie | ||
|
a yt y» = — Gr |
(6.62) | |
|
oznacza unormowaną próbkę sygnału obserwowanego (czyli próbkę sygnału standaryzowanego) Biorąc pod uwagę, żc - zgodnie z (6.45)-(6.46) - | ||
|
ko >7“ ko >7 |
(6.63) | |
Aoaptacyjna parametryzacja ortogonalna szehegów czasowych
otrzymujemy ostatecznie
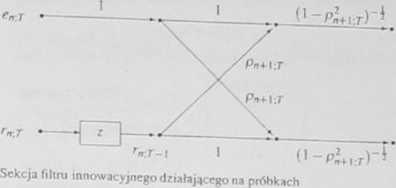
*0:7 = r0:T = Y7 = —
gt
(664)
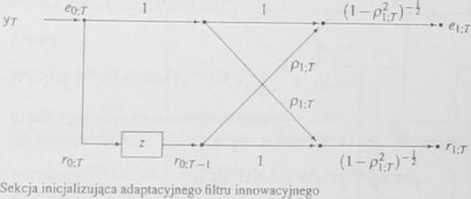
Wynika stąd sekcja inicjalizująca filtru, pokazana na rys. 6.5 lub - zgodnie z rys. 6.4 - sekcja z rys. 6.6. Realizacja kaskadowa filtru rzędu N przyjmuje więc postać pokazaną na rys. 6 7 Zauważmy, że z (6.57) dla n = 0,...,/V- I wynika, iż
(6.65)
y 7
|
7 |
0|;7 |
|
7 |
*1:7
rur
Rys. 6 6 Sekcja inicjalizująca 0\ j
RYS. 6.7. Realizacja kaskadowa filtru innowacyjnego
143
142
Wyszukiwarka
Podobne podstrony:
5 wyróżnik krajowy PN-EN 199X część Rys. 1.2. Symbole polskiej wersji Eurokodów Pakiety
6 Oddziaływania na konstrukcje Rys. 1.3. Schemat PN-EN 1991. Eurokod 1: Oddziaływania na
28 luty 09 (34) 33 Rys. 12. Kotwy do ścian szczelinowych wg PN-EN S45-1 [27] i_ u Rys. 13
IMAG0381 PN-EN 1990:2004 zmiana do normy: PN-EN 1990:2004/ A1:2006
Skrypt PKM 1 00085 170 Rys.4.22 Przyjąć współczynnik tarcia na gwincie, klinie i podparciu „nakrętki
więcej podobnych podstron