Slajd05 (41)
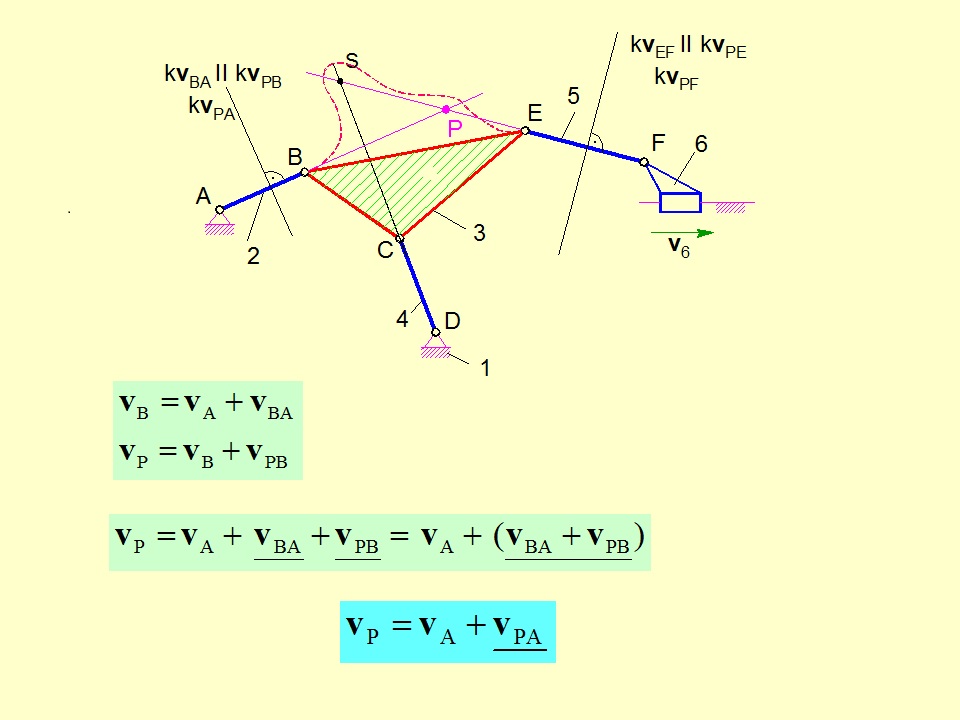
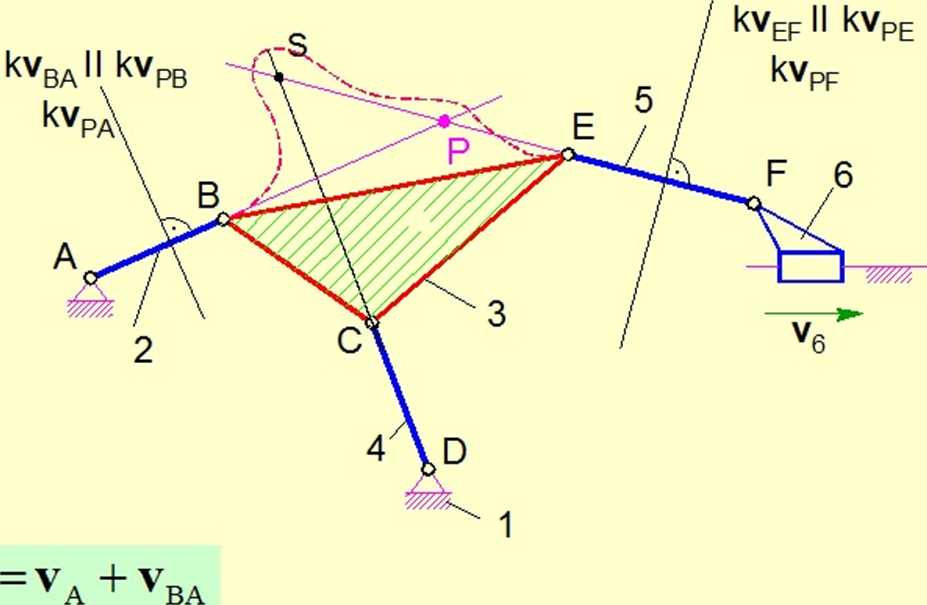
= V + V
* B “ * PB
= Vą + VBĄ +VpB = Vą + (VBĄ +VpB)
Vp =VA+VPA
Wyszukiwarka
Podobne podstrony:
skanuj0014 (51) n^ °$ $ i :fe §> $ $ ® “ f^‘"TtóSWŁ / /> Va 5 a Ia^o^Cc Wu4^1Jb> fcg
zad6 3 <o. o.) Di va o odLjvaaaOl tcx(Ja a “ 5 M o U>tVoXca^ ^vA?^>Vo^Va . po^L^cWa
TTI4^ / 1^1 WTMh D^PQ%’*</*♦ Br f- **• VA*»4. ■*>*Z*% *jŁ* •, $1 »S4M i
m4[1] «*» A f • £ m ■ BkJ J ł * %m ^■T T ♦ f • r ^ t, j B nfab * VA ^
t 0v8 (7) •V Kr.,c * ✓ ...•u.—/r,vA v Krąglica
t 0v8 (7) •V Kr.,c * ✓ ...•u.—/r,vA v Krąglica
Slajd09 (41) Modyfikacja struktury: WB = 0, brak więzów biernych, WL = 0, brak ruchliwości lokalnych
Slajd02 (41) Przekładnie zębate - cel ROBOCZY * Przeniesienie ruchu z jednego wału na drugi n Zmiana
Slajd03 (41) MECHANIZM III KLASY Możliwe równanie: VE=VF+VEF Potrzebny kierunek vE
2015 (16) rtr:............................ u ............ 41....... 1 » 41 ,ł
więcej podobnych podstron