str071 (2)
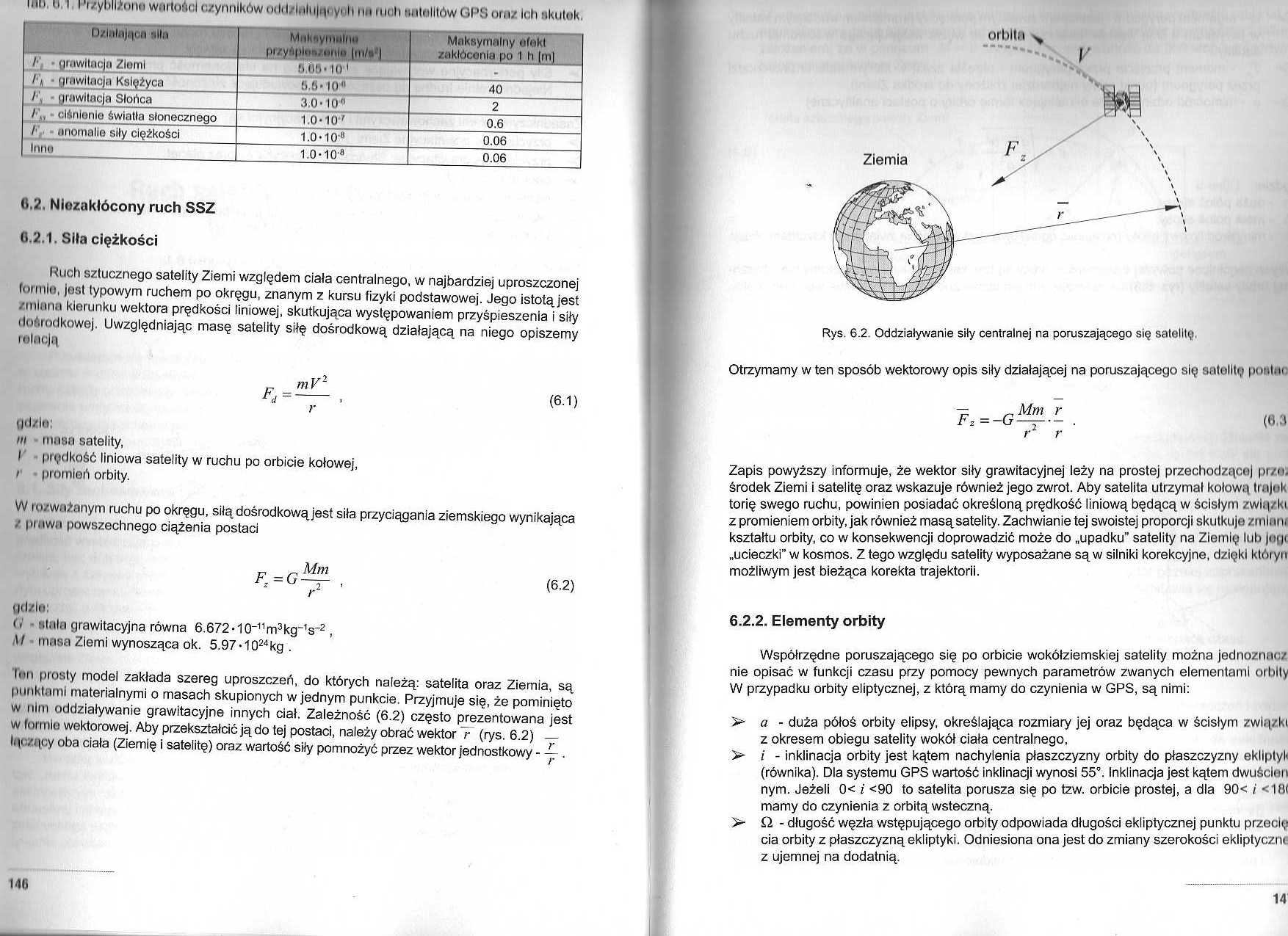
mu.11 i 1 'i/yhllżnnu w. ii li i zyrtnlków odi I "luli l|i |> V III.....ich '.nltllllÓW ()l ’! J om/ leli ulu link
mu.11 i 1 'i/yhllżnnu w. ii li i zyrtnlków odi I "luli l|i |> V III.....ich '.nltllllÓW ()l ’! J om/ leli ulu link
|
Działająca silu |
Mn|. nymalnn pizyśpInn/DiiIn |m/n | |
Maksymalny otoki zakłócenia po 1 li |in| |
|
/• grawitacja Zloml |
O.ÓB-U)1 |
- |
|
/, grawitacja Księżyca |
0,8 ■ 10" |
40 |
|
i , grawitacja Słońca |
3.0-10" |
2 |
|
/clftnlonio światła słonecznego |
1.0-10' |
0.6 |
|
/ anomalie siły ciężkości |
1.0-10-8 |
0.06 |
|
Inno |
1.0-108 |
0.06 |
0.2, Niezakłócony ruch SSZ 0.2.1. Siła ciężkości
Ruch sztucznego satelity Ziemi względem ciała centralnego, w najbardziej uproszczonej formie, jest typowym ruchem po okręgu, znanym z kursu fizyki podstawowej. Jego istotąjest /miana kierunku wektora prędkości liniowej, skutkująca występowaniem przyśpieszenia i siły dośrodkowej. Uwzględniając masę satelity siłę dośrodkową działającą na niego opiszemy folncjn
(6.1)
gd/le:
ni masa satelity,
I prędkość liniowa satelity w ruchu po orbicie kołowej, r promień orbity.
W rozważanym ruchu po okręgu, siłą dośrodkowąjest siła przyciągania ziemskiego wynikająca z prawa powszechnego ciążenia postaci
F,=G
Mm
(6.2)
gdzie:
(i ulata grawitacyjna równa 6.672• 10~11m3kg'1s~2 ,
M masa Ziemi wynosząca ok. 5.97-1024kg .
Inn prosty model zakłada szereg uproszczeń, do których należą: satelita oraz Ziemia, są punktami materialnymi o masach skupionych w jednym punkcie. Przyjmuje się, że pominięto w nim oddziaływanie grawitacyjne innych ciał. Zależność (6.2) często prezentowana jest w formie wektorowej. Aby przekształcić ją do tej postaci, należy obrać wektor r (rys. 6.2) — łączący oba ciała (Ziemię i satelitę) oraz wartość siły pomnożyć przez wektor jednostkowy - y .
orbita ^
Ziemia
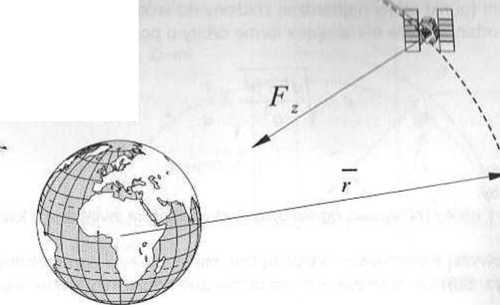
Rys. 6.2. Oddziaływanie sity centralnej na poruszającego się satelitę,
Otrzymamy w ten sposób wektorowy opis siły działającej na poruszającego się satelitę pi mim
r
r
(6 :i
Zapis powyższy informuje, że wektor siły grawitacyjnej leży na prostej przechod/ącni pi/", środek Ziemi i satelitę oraz wskazuje również jego zwrot. Aby satelita utrzymał kołow;| Iriijtik torię swego ruchu, powinien posiadać określoną prędkość liniową będącą w ścisłym związki z promieniem orbity, jak również masą satelity. Zachwianie tej swoistej proporcji skutkuje zmlnt» kształtu orbity, co w konsekwencji doprowadzić może do „upadku” satelity na Ziemię lub |t>||< „ucieczki” w kosmos. Z tego względu satelity wyposażane sąw silniki korekcyjne, dzięki któiyn możliwym jest bieżąca korekta trajektorii.
6.2.2. Elementy orbity
Współrzędne poruszającego się po orbicie wokółziemskiej satelity można jednoznm:/ nie opisać w funkcji czasu przy pomocy pewnych parametrów zwanych elementami orbity W przypadku orbity eliptycznej, z którą mamy do czynienia w GPS, są nimi:
> a - duża półoś orbity elipsy, określająca rozmiary jej oraz będąca w ścisłym związki z okresem obiegu satelity wokół ciała centralnego,
> i - inklinacja orbity jest kątem nachylenia płaszczyzny orbity do płaszczyzny ekliptyk (równika). Dla systemu GPS wartość inklinacji wynosi 55°. Inklinacja jest kątem dwuśclen nym. Jeżeli 0< i <90 to satelita porusza się po tzw. orbicie prostej, a dla 90< i <1t)( mamy do czynienia z orbitą wsteczną.
> Q - długość węzła wstępującego orbity odpowiada długości ekliptycznej punktu przeclę cia orbity z płaszczyzną ekliptyki. Odniesiona ona jest do zmiany szerokości ekliptyczne z ujemnej na dodatnią.
14
Wyszukiwarka
Podobne podstrony:
HPIM9277 ii nn s:-* * « 8 r •a-i1558 sililitlili! 3. I iin * Ck 6 * Sf łlł » F > 6 11 fJ! !?!II
P1027[02] 06 11 «
f jJj Lć. 11 ZJj "" ii K li 1 «■ :/. -»jS§j
łu iiiiiiumu m mu 11 ilnuUlilUlilii lUiipil M im i * mmirnu miiiiuim itnlulUi iii iii! i liii i Iii
napiecie powierzchniowe jpeg ł MU ii li ul ust.mnie os.id/a Mi, In ml, w którego skład l 11 • • i
im2 1 IJ 1 łl i 1 1 11 ■ Wm 7! ii 1 ■ 1 u 1 fi 1II 1 li II tl II l! • u ’ !• -
10 pazdziernik 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 f
vnt I I I II .11 je < >!il( li uiiasli twn 1 . 1 tym g< >1 ; V* V. 11 u m są ą , wym
wykład 11 15 czI UAMl w iU
P1040580 resized 90 WlEŁŁÓC MtfeO^L Nazwisko, ImięChemia Organiczna Kol II wersja 2 fp? mu,11 Om 7.
więcej podobnych podstron