MaszynaW 22
46 3. Opis symulatora
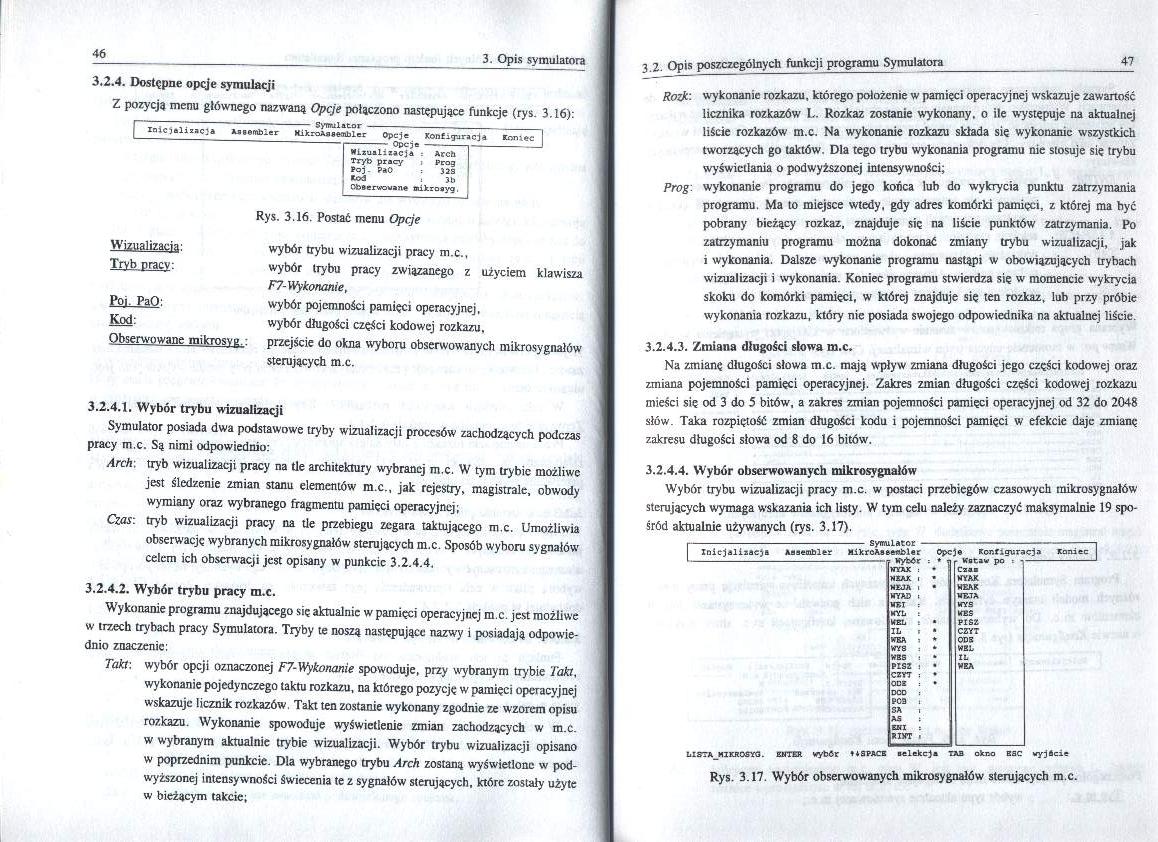
3.2.4. Dostępne opcje symulacji
Z pozycją menu głównego nazwaną Opcje połączono następujące funkcje (rys. 3.16):
------ Symulator-i
l zoicjalizac;* JUaemblcr KikroAssembler Opcje Konfiguracja Koniec
wizualizacja : Arch
Tryb pracy Próg
Rod Jb
Obserwowane oukroayg
Rys. 3.16. Postać menu Opcje
Wąyąlizaęja:
Tryb pracy:
Poj._PaO:
Kod:
Obserwowane mikrosyg.:
wybór trybu wizualizacji pracy m.c.,
wybór trybu pracy związanego z użyciem klawisza
F7-Wykonanie,
wybór pojemności pamięci operacyjnej.
wybór długości części kodowej rozkazu.
przejście do okna wyboru obserwowanych mikrosygnałów
sterujących m.c.
3.2.4.1. Wybór trybu wizualizacji
Symulator posiada dwa podstawowe tryby wizualizacji procesów zachodzących podczas pracy m.c. Są nimi odpowiednio:
Arch: tryb wizualizacji pracy na tle architektury wybranej m.c. W tym trybie możliwe jest śledzenie zmian stanu elementów m.c., jak rejestry, magistrale, obwody wymiany oraz wybranego fragmentu pamięci operacyjnej;
Czas: tryb wizualizacji pracy na tle przebiegu zegara taktującego m.c. Umożliwia obserwację wybranych mikrosygnałów sterujących m.c. Sposób wyboru sygnałów celem ich obserwacji jest opisany w punkcie 3.2.4.4.
3.2.4.2. Wybór trybu pracy m.c.
Wykonanie programu znajdującego się aktualnie w pamięci operacyjnej m.c. jest możliwe w trzech trybach pracy Symulatora. Tryby te noszą następujące nazwy i posiadają odpowiednio znaczenie:
Takt: wybór opcji oznaczonej F7-Wykonanie spowoduje, przy wybranym trybie Takt, wykonanie pojedynczego taktu rozkazu, na którego pozycję w pamięci operacyjnej wskazuje licznik rozkazów. Takt ten zostanie wykonany zgodnie ze wzorem opisu rozkazu. Wykonanie spowoduje wyświetlenie zmian zachodzących w m.c. w wybranym aktualnie trybie wizualizacji. Wybór trybu wizualizacji opisano w poprzednim punkcie. Dla wybranego trybu Arch zostaną wyświetlone w podwyższonej intensywności świecenia te z sygnałów sterujących, które zostały użyte w bieżącym takcie;
RozM'. wykonanie rozkazu, którego położenie w pamięci operacyjnej wskazuje zawartość licznika rozkazów L. Rozkaz zostanie wykonany, o ile występuje na aktualnej liście rozkazów m.c. Na wykonanie rozkazu składa się wykonanie wszystkich tworzących go taktów. Dla tego trybu wykonania programu nie stosuje się trybu wyświetlania o podwyższonej intensywności;
Próg: wykonanie programu do jego końca lub do wykrycia punktu zatrzymania programu. Ma to miejsce wtedy, gdy adres komórki pamięci, z której ma hyć pobrany bieżący rozkaz, znajduje się na liście punktów zatrzymania. Po zatrzymaniu programu można dokonać zmiany trybu wizualizacji, jak i wykonania. Dalsze wykonanie programu nastąpi w obowiązujących trybach wizualizacji i wykonania. Koniec programu stwierdza się w momencie wykrycia skoku do komórki pamięci, w której znajduje się ten rozkaz, lub przy próbie wykonania rozkazu, który nie posiada swojego odpowiednika na aktualnej liście.
3.2.4.3. Zmiana długości słowa m.c.
Na zmianę długości słowa m.c. mają wpływ zmiana długości jego części kodowej oraz zmiana pojemności pamięci operacyjnej. Zakres zmian długości części kodowej rozkazu mieści się od 3 do 5 bitów, a zakres zmian pojemności pamięci operacyjnej od 32 do 2048 słów. Taka rozpiętość zmian długości kodu i pojemności pamięci w efekcie daje zmianę zakresu długości słowra od 8 do 16 bitów.
3.2.4.4. Wybór obserwowanych mikrosygnałów
Wybór trybu wizualizacji pracy m.c. w postaci przebiegów czasowych mikrosygnałów sterujących wymaga wskazania ich listy. W tym celu należy zaznaczyć maksymalnie 19 spośród aktualnie używanych (rys. 3.17).
r--Symulator ...... ........1
|
wybOr |
♦ |
Wstaw po t |
|
WYAX : |
• |
Czas |
|
MSAK . |
• | |
WY AK |
|
WIJA i |
• |
MŁAK |
|
WYAD i |
WT.7A | |
|
UT,I |
WYS | |
|
MYL |
WES | |
|
UEŁ, |
• |
PISZ |
|
IL |
• |
CZYT |
|
WRA |
• |
ODS |
|
WYS |
WKL | |
|
WBS |
• |
IL |
|
PISZ : |
• |
WEA |
|
CZY7 : |
• | |
|
001 | ||
|
DCO PC9 i SA i AS EHI KIHT . |
Inicjalizaeja Asseonbltr MikroAaeauiblar Oj>c}e Konfiguracja Koniec |
UISTAJHKROSYO. ENTER wyMr łłSPACl •elekcja TAfl okno ESC wyjicie
Rys. 3.17. Wybór obserwowanych mikrosygnałów sterujących m.c.
Wyszukiwarka
Podobne podstrony:
MaszynaW 24 50 3. Opis symulatora wyxA *w«x foćcoooóoj Rys. 3.22. Architektura m c. typu L dla 8-bit
MaszynaW 18 40 3. Opis symulatora 3.2.1.4. Zerowanie elementów m.c. Z tą opcją menu związane jest po
MaszynaW 21 44 3. Opis symulatora w punkcie 3.2.2.4. Różnica polega tylko na tym, że w tamtym wypadk
MaszynaW 26 54 3. Opis symulatora 3.3.6. Rozkaz SOM ROZKAZ TYP = W KOD - 101 MNE = SOM OPIS = ’
więcej podobnych podstron