62949 Mechanika05
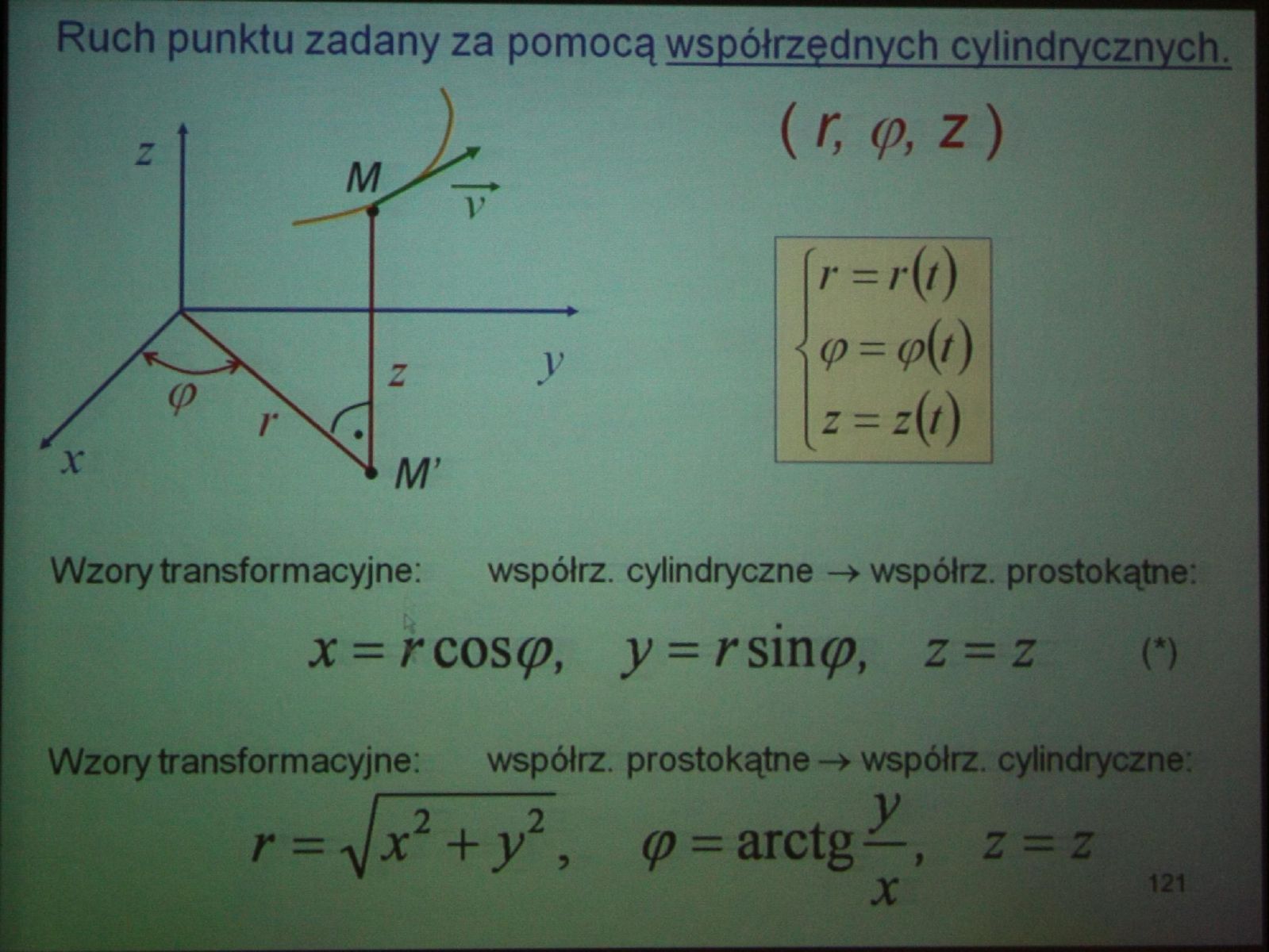
Ruch punktu zadany za pomocą współrzędnych cvlindrv<«Mj
(r, v, z) pM I
- <p=<p(t)
Nz=,(/)|
Wzory transformacyjne: współrz. cylindryczne ->■ współrz. prostokącie:
x = rcos<p, y = rsin<p, z-z
Wzory transformacyjne: współrz. prostokątne -+ współrz. cylindryczne:
Wyszukiwarka
Podobne podstrony:
Mechanika06 Ruch punktu zadany za pomocą współrzędnych cvlindrvcznvcłi# c.d. Współrzędne cylindryczn
Mechanika08 Ruch punktu zadany za pomocą współrzędnych) sfiSyfzniffi X
71093 Mechanika09 Ruch punktu zadany za pomocą współrzędnych Itfervcznvaifc
Mechanika03 Ruch punktu można również zapisać za pomocą wektora iiomienia wodzącego (we współrzędnyc
Mechanika00 Kinematyka punktu. Ruch punktu zadany we współrzędnych prostokatiiMlMH Ruch punktu w
18
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
Image25 (26) 48 1.14 a. Przyspieszenie punktu poruszającego się po okręgu wyraża się za pomocą współ
więcej podobnych podstron