81626 str022 (3)
................. nntWIWI U|’FI |tl|"i. .‘Illllj
|
Niezawodność Sinwlitu < ii':; |
Uwuninkowmiio |
|
co nnjmnloj 00.04 % (lokalizacja uśrednione globalnie) |
■ li) ni mnlu.yutrtllty <l>go■'<.'> .miny Irlątl pomiaru ndlugloścl pi/n/ użytkowniku. ■ wartość ni.......winn> nu podstawie I roku, uśredniając pomlnty d/lnnnii i iiltign Olobu, ■ standard doput..-i ,-a t awario przypadające na 1 rok i trwające nie więcej niż li godzin, |
|
co najmniej 90.79 % (uśredniona globalnie dla najgorszego punktu) |
■ 30 m ■ maksymalny dopuszczalny błąd pomiaru odległości przez użytkownika, ■ wartość oszacowano na podstawie 1 roku, uśredniając pomiary dzienne z całego Globu dla najgorszego punktu, ■ standard dopuszcza 3 awarie przypadające na 1 rok i trwające nie więcej niż 6 godzin. |
2.4.5. Dokładność określenia pozycji
To niewątpliwie najczęściej przytaczane kryterium oceny systemu nawigacyjnego, stanowiące w potocznym mniemaniu o jego jakości. Niestety zbyt częste zapominanie o innych cechach eksploatacyjnych stanowi o powierzchowności takiego spojrzenia. Nim przedstawimy poszczególne wartości dokładności systemu, przeanalizujmy pokrótce miary dokładności określenia pozycji, których zrozumienie umożliwia poprawną interpretację przytaczanych wartości. Pt/oz pojęcie dokładności określenia pozycji oznacza się stopień zgodności statystyk (ich rozkładów) zmierzonych (określonych) współrzędnych pozycji z wartościami rzeczywistymi liii) tymi, które przyjmujemy za rzeczywiste. Należy tu zaznaczyć, że miarą dokładności określi min pozycji jest jej błąd, który możemy oceniać w odniesieniu do dowolnego wymiaru: prze-sli/oni lub płaszczyzn [błąd poziomy (horyzontalny), błąd pionowy (wertykalny)]. W nawigacji morskiej najczęściej przytaczaną wartością jest błąd horyzontalny, podczas gdy w lotnictwie ozy nawigacji lądowej błąd wertykalny (w płaszczyźnie pionowej) stanowi konieczne uzupeł-nltinlo odnosząc pomiar współrzędnych pozycji do jej przestrzennej natury. Należy podkreślić, /o illu togo samego systemu i w tym samym czasie wszystkie wymienione miary dokładności określenia pozycji mogą posiadać (i najczęściej posiadają) różne wartości - stąd ważne, by /rozumieć ich istotę. W kolejnych podrozdziałach scharakteryzowane zostaną 3 rodzaje dokładności: przewidywana, powtarzalna oraz względna. Jednakże, ze względu na istotne zmiany wprowadzone wyłączeniem 2 maja 2000 r. selektywnej dostępności, każda z nich zostanie omówiona oddzielnie zarówno dla systemu działającego z wyłączonym, jak i włączonym SA. Podczas analizy poszczególnych wykresów i tabel, należy każdorazowo zwracać uwagę, dla jakiego stanu SA są one podawane.
2.4.5.1. Dokładność przewidywana
Dokładność przewidywana określenia pozycji (ang.: predictable accuracy) - to
dokładność określenia pozycji wyrażona w systemie współrzędnych geodezyjnych, związana ,■ modelem Ziemi - elipsoidą. Dokładność przewidywana informuje o rozkładzie pozycji zmierzonych systemem w stosunku do ich wartości rzeczywistych, wyznaczonych z wysoką precyzją (teoretycznie - bezbłędnie) w układzie współrzędnych używanych przez system. W przypadku GPS będzie to - WGS-84. Miara ta jest najczęściej przytaczanym wskaźnikiem dokładności systemów nawigacyjnych, bowiem daje zasadniczą informację dotyczącąjakości rozwiązania nawigacyjnego wraz z dowiązaniem do układu współrzędnych.
Alty pomlNiown wy/Mw /yć wartość dokłndnoftul pi ziiwlcływnnel dlii nynlumu Cil’8, tn>l<*>y prowadzić długolormirinwii ulmorwnoję rozkładu po/yu|i olr/ymniui| / dnnngo odbiorniku w stosunku do punktu, kldrugo współrzędne znamy / wysoką |>nn y/|.| Zo względu rui zmienność konfiguracji s.itnllluw w polu widzenia obuorwatum powodulącą zmiany wapólczynnlków geometrycznych, imlttloiiki wiarygodnych wartości to) zmlennoj musi obejmować kllkudzloslę dodniowe sesjo pomiarowo. Okaże się bowiem, że każdego dnia zmierzono w tori sposób błędy będą nieznacznie różniły się. W oparciu o 30-lo dniowo badania systemu GPS, przeprowadzone w różnych miejscach Ziemi, można dopiero wnioskować o poszczególnych miniach W taki właśnie sposób oszacowano wszystkie z omawianych tu miar dokładności, Badani* empiryczne systemu (przy włączonym SA) dowiodły, że wariancje błędu pozycji pomiarów stacjonarnych w poszczególnych kierunkach wyniosły średnio:
> składowa E-W - 15 %,
>■ składowa N-S - 14 %,
> składowa pionowa - 10 %,
> składowa horyzontalna 10 %,
wartości błędu pozycji z p=0.95.
Z przytoczonych wielkości wynika, że rozkład błędu pozycji w kierunkacłi południkowy!,l i równoleżnikowych jest praktycznie taki sam. Stąd za reprezentację wartości błędu przyjęli w systemie GPS błąd kołowy (2D) lub sferyczny (3D).
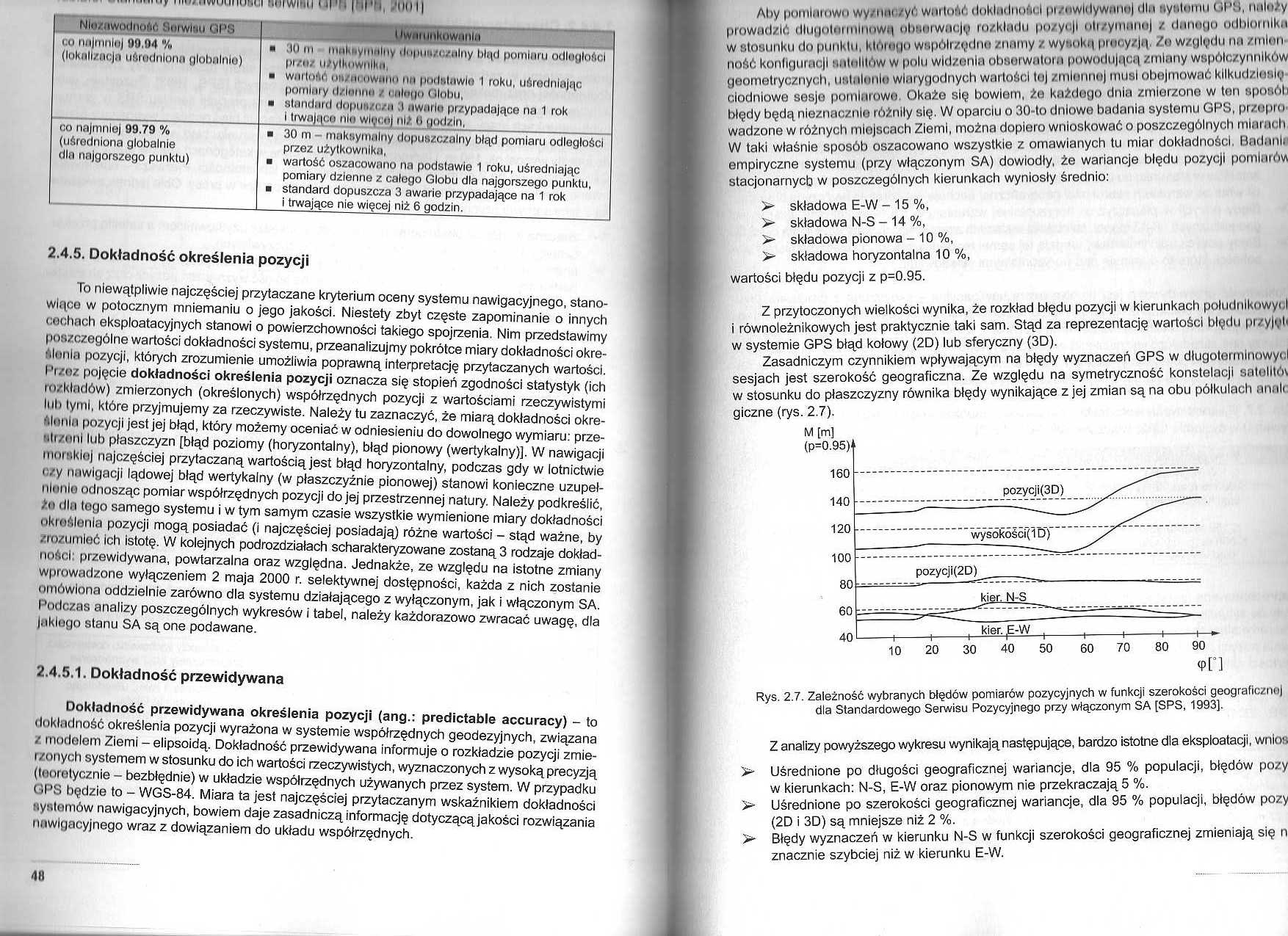
Zasadniczym czynnikiem wpływającym na błędy wyznaczeń GPS w długotermlnowycl sesjach jest szerokość geograficzna. Ze względu na symetryczność konstelacji satolltńi, w stosunku do płaszczyzny równika błędy wynikające z jej zmian są na obu półkulach onnl< giczne (rys. 2.7).
M [m]
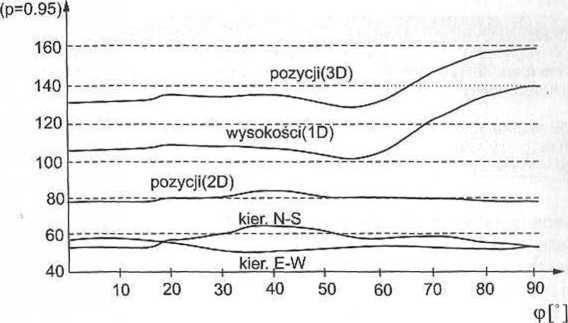
Rys. 2.7. Zależność wybranych błędów pomiarów pozycyjnych w funkcji szerokości geograficzmi| dla Standardowego Serwisu Pozycyjnego przy włączonym SA [SPS, 1993],
Z analizy powyższego wykresu wynikają następujące, bardzo istotne dla eksploatacji, wnios
>- Uśrednione po długości geograficznej wariancje, dla 95 % populacji, błędów pozy w kierunkach: N-S, E-W oraz pionowym nie przekraczają 5 %.
> Uśrednione po szerokości geograficznej wariancje, dla 95 % populacji, błędów pozy (2D i 3D) są mniejsze niż 2 %.
> Błędy wyznaczeń w kierunku N-S w funkcji szerokości geograficznej zmieniają się n znacznie szybciej niż w kierunku E-W.
Wyszukiwarka
Podobne podstrony:
Garden 2 W (Ul i (llljm ■ IR illi ii fi n [Tł 7’r”" a . i l.łiLr- :*n Xf TES
gnolls PCX U iH. H
cvrsml Heaton MVengeance1 afi 1 - fi - - łfe fi • M 1 1 ‘ 1^ --’** * 1 ^ 1^1 fi. Tl
skanuj0013 (10) - >5 S 5 > s b 1 fll-a/S 3 fi-? i & 1<*P* S=%=* =5/ tl il i! hit ii s s
DSCN0972 - ICO*b -«/ k>W - W^r <*/*. , V ) 0 5^ Otdo-fi/tL /o4<Ł f C/ane
1 I .1 I I I fi tl • i. * . cc. /ć. /J. IDfjf (&)i i . * ! *
58007 tv8F08 (13) r fi: • * * Tl 1* * * :• * ♦f fe * i ■ • * i* * :l i f* * %
25097 skanowanie0033 [1600x1200] Rłciu»i4y ■ p _ • li fi?Tl UVV^
i . - ♦> w w^HJjiiL S * 1 V iS. WrJPkJL .Fi tŁ: R . r* j N
vi 01 in ł. w u -• lOOl^OIlflłiWW-iOlOCONlIJiUlł-WWJO £ 3 3 a_ fi Tl ni ni o. m 3. 3 n 2?. m 3 3 c
tv8F08 (13) r fi: • * * Tl 1* * * :• * ♦f fe * i ■ • * i* * :l i f* * %
— / ms -m , 1 ’g jj
DSC03440 -f- mfj l.v- Ur;:fN • i* * * ■ fe p : fi i# ’^l tł J§
więcej podobnych podstron