85137 IMG852 (2)
Obliczenie średnicy zewnętrznej nakrętki z warunku dopuszczalnych nacisków statycznych
1
M =
4Q
Pdopst1
+ D'J
jyN —średnica zewnętrzna nakrętki (powierzchni oporowej), m,
D'a —średnica wewnętrzna powierzchni oporowej, m,
A'h —powierzchnia oporowa, na której spoczywa
nakrętka, m2,.
Q 4-siłaCobęiążąjąca/.N, .
p'' —naciski rzeczywiste Występujące na powierzchni oporowej. Pa,
Pdopjt—naciski dopuszczalne statyczne (nakrętka nie obraca się względem powierzchni oporowej), Pa.
Obliczenie minimalnej liczby skoków gwintu z warunku dopuszczalnych nacisków ruchowych
keJ—naprężenia dopuszczalne na ściskanie jednostronne, Pa.
(A.12) o2 = y/ah+(ax)2
Jest to wzór wytężeniowy, według którego oblicza się naprężenie zastępcze (zredukowane) przy przejściu z dwuwymiarowego na jednowymiarowy stan naprężeń.
ac]—naprężenia ściskające występujące w rdzeniu śruby, Pa,
r —naprężenie skręcające działające na rdzeń . śruby, Pa,
a^-współczynnik redukcyjny.
r Q 4Q\ r_K. a_ksL I
*J ud'2 ncĘ’ W,’ ktJ
4
Q — obciążenie rdzenia śruby, N,
Ą —średnica wewnętrzna gwintu, rdzenia śruby, m. |
net2 nD'i
ud"2 16~
%2d'2
Ań = —---
Wa—wskaźnik wytrzymałości pola przekroju rdzenia śruby na skręcanie, m3.
Ms = Mt = F^; F=*Qlg(/+e')
nobl —liczba obciążonych zwojów gwintu zdolnych przenieść obciążenie Q przy założo-. nych. nadskacb piopr,_
. i. : -rśrednicaiZewnętrzna:gwintu:śniby,-m,
D\ — średnica-iwewnętrzna, gwintunakrętki, jn,. Ac -^póhheizchńiawspółprzcująćego gwintu śnr=?
by i nakrętki, m2,-Q —siła obciążająca, N, f —nadski rzeczywiste występujące na powierzchni gwintu,
Pioor—naciski dopuszczalne ruchowe (gwint śruby przemieszcza się względem gwintu nakrętki).
Sprawdzenie warunku wytężenia
M, —moment skręcający (obrotowy) potrzebny do obrócenia nakrętki i pokonania momentu tarda MT występującego między powierzchniami gwintu .śruby i nakrętki, N-ra,. ..
A0—-moment tarcia,.K*m,‘-_
dj' — średnica podziałowa gwintu śruby i nakrętki,, m.
kej —naprężenia dopuszczalne na śdskanie jednostronne, Pa,
kSJ- —naprężenia dopuszczalne na skręcanie jednostronne, Pa.
W praktyce przyjmuje się dla naprężeń jednoimien-
BM
(f|i *x<kej
at —naprężenia zastępcze. Pa,
Zaleca się sprawdzenie — dla przyjętego materiału śruby—powyższej zależnośd.
A3.1. Krótka charakterystyka stosowanych dźwigników
Dźwigniki służą do podnoszenia przedmiotów pionowo — lub w kierunku zbliżonym do pionowego ■r- za pomocą elementów wykonawczych (nie dę-gien) na niewielką wysokość. Najbardziej rozpo
wszechnione są trzy rodzaje dźwigników: zębatkowy, tłokowy i śrubowy.
Dźwigniki (podnośniki) śrubowe są przeznaczone do podnoszenia stosunkowo niewielkich mas (rzędu kilku ton) na wysokość do ok. 0,6 m. Mają szerokie zastosowanie przy wykonywaniu prac remontowych wszelkiego typu pojazdów, urządzeń i maszyn.
A.3.2. Zasada działania podnośnika śrubowego sumowcgo
Podnośnik śrubowy sumowy składa się z następujących podstawowych części (rys. A.1): 1 — korpusu, 2 — śruby zewnętrznej, 3 — śruby wewnętrznej, 4 — nakrętki śruby zewnętrznej, 5 — nakrętki śruby wewnętrznej, 6—głowicy, 7—mechanizmu zapadkowego (grzechotki).
Elementami podnoszącymi są obie śruby. Uwaga:, śruba wewnętrzna (nie obraca się) jest osadzona nieruchomo w nakrętce.
W celu podniesienia przedmiotu (ciężaru) należy wykręcić ręką śrubę wewnętrzną, aż głowica zetknie się z podnoszonym przedmiotem, a następnie obracać dźwignię umieszczoną na śrubie zewnętrznej (rys. A.1). Śruba zewnętrzna ma gwint prawy, a wewnętrzna — lewy. Jeśli skoki obu śrub są jednakowe, śruby wysuwają się na taką samą odległość. Nakrętka 4 i śruba 3 nie obracają się. Zależnie od kierunku obrotu dźwignią głowica opuszcza się lub podnosi.
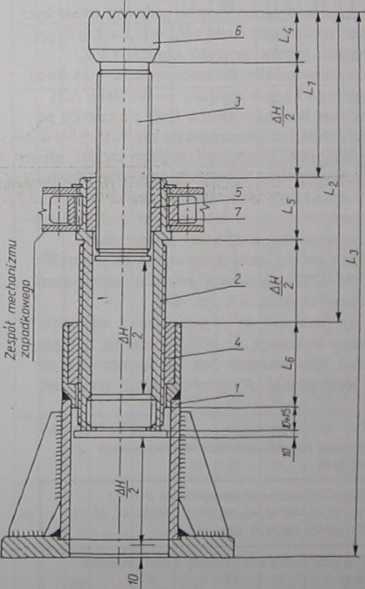
Rys. A.1. Koncepcja rozwiązania konstrukcyjnego podnośnika śrubowego sumowego (uwaga: rysunek nie jest wykonany w podział ce)
Mechanizm zapadkowy, tzw. grzechotka, ułatwia pracę podnośnikiem, ponieważ eliminuje potrzebę wykonywania pełnego obrotu dźwigni wokół podnośnika. Mechanizm zapadkowy składa się z koła zapadkowego i zapadki. Koło jest osadzone na śrubie zewnętrznej, zapadka zaś jest zamocowana obrotowo na czopie dźwigni podnośnika. Kształty wycięć obu współpracujących części są tak dobrane, że obrót koła zapadkowego jest możliwy tylko w kierunku odpowiadającym podnoszeniu. Aby ciężar opuścić, należy zmienić ustawienie popycha-cza we wrębie koła zapadkowego.
A33. Wprowadzenie do obliczeń wytrzymałościowych śrub podnośników
Obliczanie śrub podnośników polega na określeniu średnicy dt rdzenia śruby z warunku na wyboczenie niesprężyste. Określenie wy boczenia części maszyny, np. śruby podnośnika, sprowadza się do wyznaczenia krytycznej wartości obciążenia, przy której wychylona z położenia pierwotnej równowagi część maszyny nadal zachowuje równowagę, mimo -towarzyszących temu wychyleniu zmian wartości i kierunków działania sił wewnętrznych i zewnętrznych.
O charakterze wytoczenia (sprężyste lub niesprężyste) decyduje smukłość określana z warunku geometrycznego za pomocą wzoru A.1. Ramię bezwładności pola przekroju pręta oblicza się wg wzoru A.2. Sposób określenia długości wyboczenio-wej lw śruby przedstawia rys. A.2, a rodzaje wy boczenia oraz sposoby obliczania prętów w zależności od ich smukłości — rys. A.3. Przez zmianę wymiarów wzdłużnych (wysokościowych) i poprzecznych pręta można osiągać określony rodzaj wyboczenia, Smuklością rozgraniczającą wyboczenie niesprężyste od wyboczenia sprężystego jest smukłość graniczna X (rys. A.3), którą wyznacza się wg wzoru

i
Rys. A.2. Wyznaczanie długości wyboczeniowej śruby podnoś-

90
Wyszukiwarka
Podobne podstrony:
untitled4 11. Obliczanie średnicy .kołnierza nakrętki z warunku na naciski powierzchniowe (między ko
2. Obliczenia średnicy zewnętrznej dxM I wysokości HM nakrętki Materiał nakrętki brąz BA 1032 dla kt
Koreo* Należy wykonać: obliczenie gwintu śruby głównej obliczenie średnicy zewnętrznej
p0001 a. Oblicz średnicę zewnętrzną elementu rurowego przenoszącego obciążenia F=15kN jeśli średnica
39429 Skrypt PKM 1 00079 158 Obliczanie wysokości nakrętki z warunku na naciski Wymagana powierzchni
skanuj0008 (389) 3. Sprawdzenie długości nakrętki do dobranej śruby oczkowej, z warunku na dopuszcz
skanuj0225 (4) Obliczanie łożysk ślizgowych wzdłużnych polega na obliczeniu średnic czopa z warunku
więcej podobnych podstron