12973 S6302613
1U,5/2900
obr
min
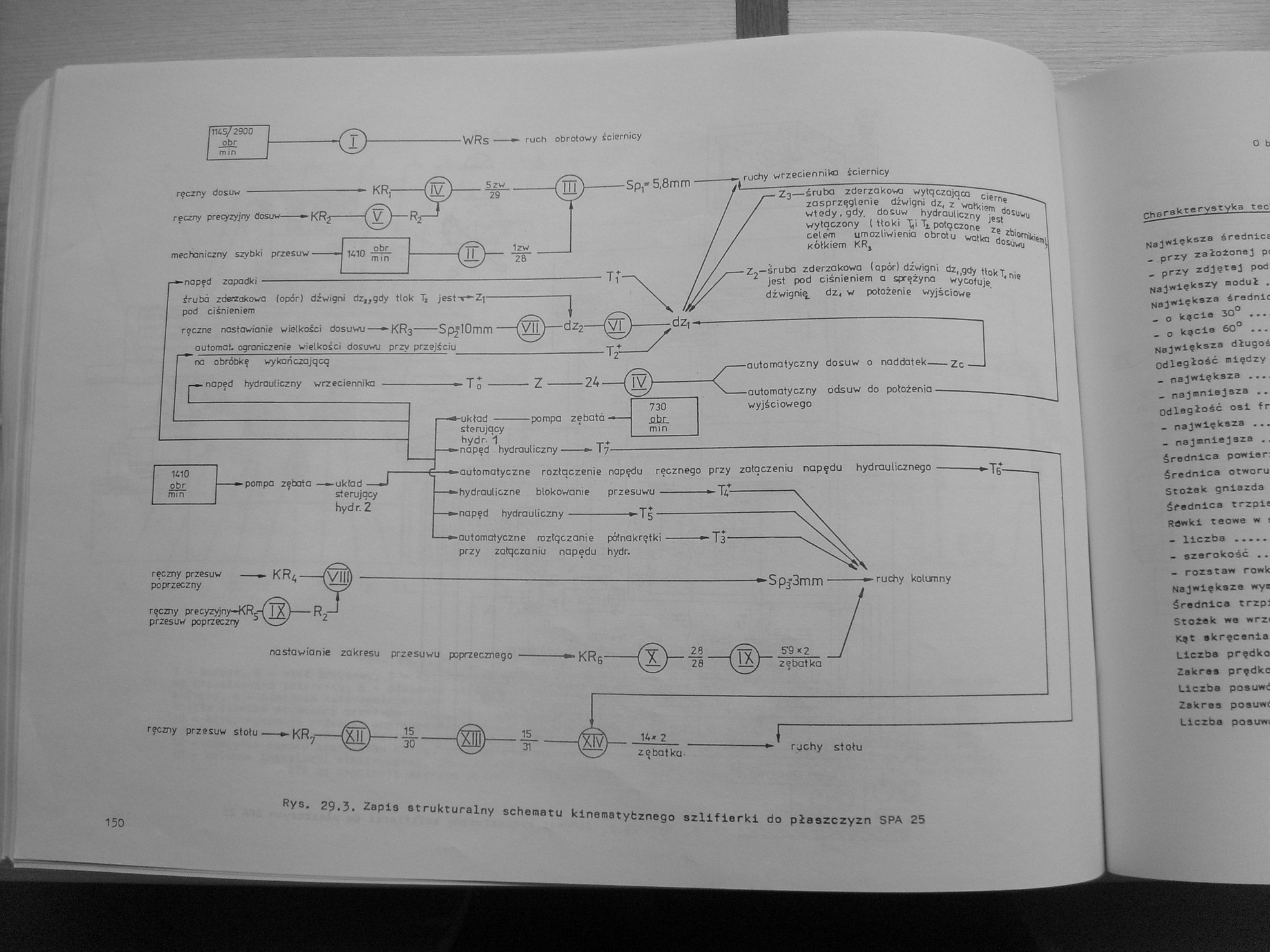
WRs
ruch obrotowy ściernicy
ręczny dosuw
ręczry precyzyjny

mechaniczny szybki przesuw P*- napęd zapadki-
-26l _ńr\— ^
min 28
|
,,10 -2br. |
t | |
|
wu min |
śruba zderzakowa (opór) dźwigni dztfgdy tłok jest-r^Zj pod ciśnieniem
ręczne nastawianie wielkości dosuwu —KR3 automat, ograniczenie wielkości dosuwu przy na obróbkę wykańczającą
napęd hydrauliczny wrzeciennika - -

-SpflOmm —($E)—dz2—(w)-
przejściu__/
Sp,- 5.8mm
ruchy wrzeciennita ściernicy
Z 3—śruba zderzakowa wytaczająca cierne
zasprzęglenie dźwigni dz« z wątkiem dosuwu wtedy»gdy. dosuw hydrauliczny jest wytoczony l tłoki \\ \ połączone ze zbiomfc^ celem umożliwienia obrotu watka dosuwu Kotkiem KR.
Z2—śruba zderzakowa (opór) dźwigni dz,,gdy tłok T, nie jest pod ciśnieniem a sprężyna wycofuje, dźwignię. dz4 w położenie wyjściowe
T
24
SM*
pompa zębata
-układ — sterujący
hyd r. 1: \
-napęd hydrauliczny —► I7-
730
obr
min
automatyczny dosuw o naddatek-Zc —
■automatyczny ódsuw do położenia wyjściowego
1410
obr
min
pompa zębata — układ
sterujący hydr. 2
ręczny przesuw —«R/_Mfll
Doorzeczny H v JLiiy
•automatyczne rozłączenie napędu ręcznego przy załączeniu napędu hydraulicznego
-hydrauliczne blokowanie przesuwu - ■*- T4-
-napęd hydrauliczny ►Ts
-automatyczne rozłączanie pólnakrętki przy załączaniu napędu hydr.
•Te-
poprzeczny
ręczny precyzyjny-KR przesuw poprzeczry
— R -I
nastawianie zakresu przesuwu poprzecznego
fcSpj3mm-►ruchy kolumny

ręczny przesuw stołu

|
p 15 |
-/ym |
|
30 |
Pi |

14* 2
zębatka.
ruchy stołu
150
Wyszukiwarka
Podobne podstrony:
Hn@*>c4fe7 0=10. H=10 dtzy n=1450 obr/min na prędkośd obrotową 2900 obr/min. ^pregową charakterys
Photo0006 1^1 m, = 1,32 do 1,35 dla n < 300 obr/min, ms = 1,35 do 1,38 dla /; > 300 obr/min. P
Logistyka - nauka obr/min) oraz prędkości obrotowej maksymalnego momentu obrotowego generowanego prz
61537 S6302609 m % ~(ź)~ i^i^psaęu-s -{IV W/?5 -- ruch obrotowy ściernicy I 6SS,694,6uo) _ wotom) 61
IMAG1789 Prędkość obrotowa silnika (obr/min) 1^9^ ~ określa liczba obrotów wołu korbowego no
DSC?57 Prędkość skrawania (szlifowanie) Dla szlifowania, gdzie ruchem głównym jest ruch obrotowy ści
S6302583 RUCH‘wRZECI0nU1^ REWOLWER,^
E = COco M = COI, - gdy ruch wirnika wyrazimy prędkością obrotową n [obr/min] E = CcOn M = CMOI, gdz
SSM10031 Rębarki bębnowe - średnicę bębna 0.3 - 1.0 m, ^ - obroty 600 - 900 obr/mi
więcej podobnych podstron