62769 Slajd19 (81)
KINEMATYKA
położenia (konfiguracja) układu - prędkość - przyspieszenie
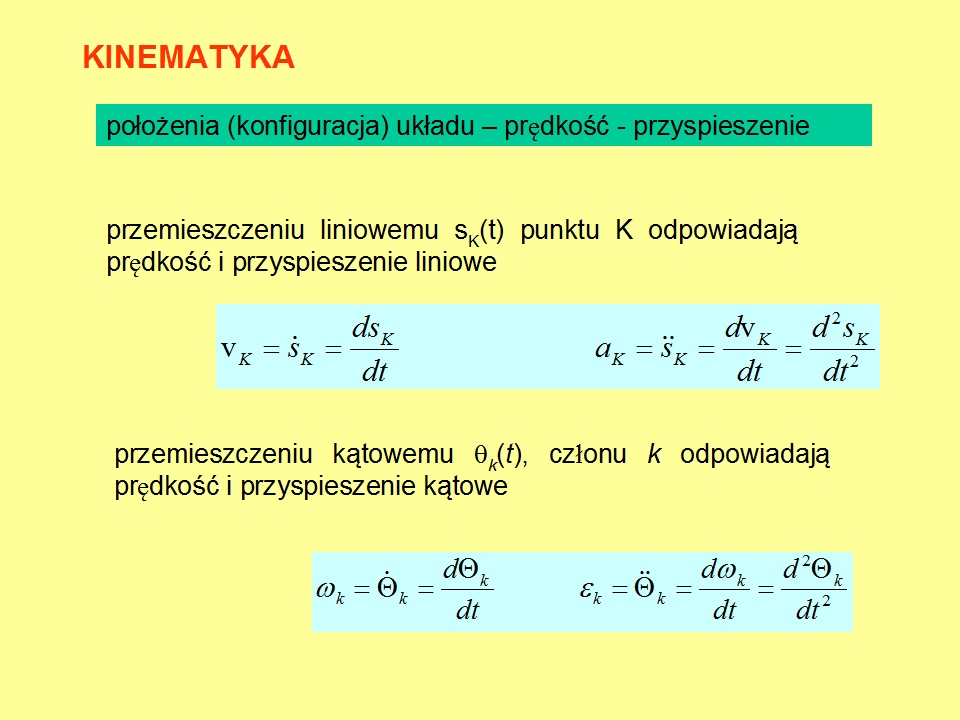
przemieszczeniu liniowemu sK(t) punktu K odpowiadają prędkość i przyspieszenie liniowe
|
dsK V = s =-Ł- K K dt |
dv v d2sr aK = sK = —— = — K K dt dt2 |
przemieszczeniu kątowemu Qk(t), członu k odpowiadają prędkość i przyspieszenie kątowe
|
A d&k cok = Qk = * dt |
. _© _dcot_d'-@t ‘ dt ' dt2 |
Wyszukiwarka
Podobne podstrony:
Slajd25 (81) Położenie - konfiguracja układu
Slajd22 (83) Położenie - konfiguracja układu A
60287 Slajd24 (82) Położenie - konfiguracja układu 7/77"
więcej podobnych podstron