75545 skanuj0406
a = 6 (połączenie członów w sposób uniemożliwiający jakikolwiek ruch względem siebie) otrzymuje się pięć klas par, oznaczonych liczbami Vh-I.
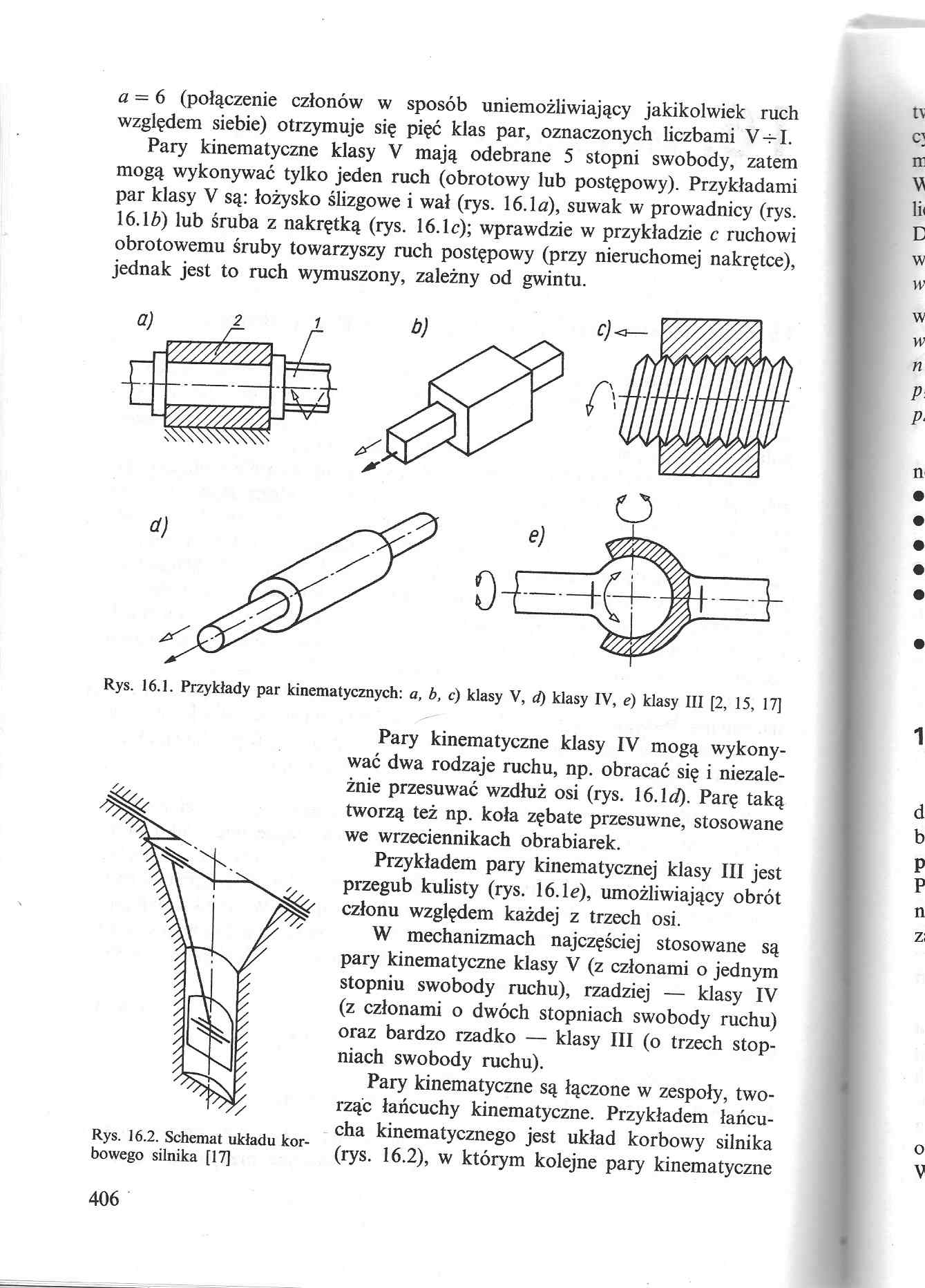
Pary kinematyczne klasy V mają odebrane 5 stopni swobody, zatem mogą wykonywać tylko jeden ruch (obrotowy lub postępowy). Przykładami par klasy V są: łożysko ślizgowe i wał (rys. 16.1 a), suwak w prowadnicy (rys. 16.1Ó) lub śruba z nakrętką (rys. 16.1c); wprawdzie w przykładzie c ruchowi obrotowemu śruby towarzyszy ruch postępowy (przy nieruchomej nakrętce), jednak jest to ruch wymuszony, zależny od gwintu.
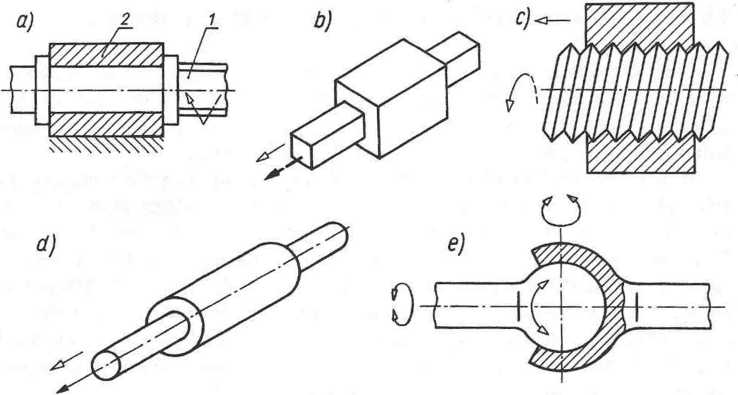
Rys. 16.1. Przykłady par kinematycznych: a, b, c) klasy V, d) klasy IV, e) klasy III [2, 15, 17]
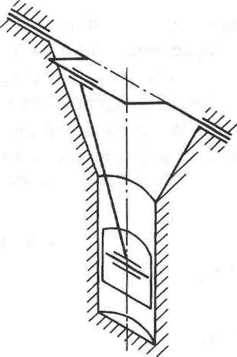
Rys. 16.2. Schemat układu korbowego silnika [17]
Pary kinematyczne klasy IV mogą wykonywać dwa rodzaje ruchu, np. obracać się i niezależnie przesuwać wzdłuż osi (rys. 16.1 d). Parę taką tworzą też np. koła zębate przesuwne, stosowane we wrzeciennikach obrabiarek.
Przykładem pary kinematycznej klasy III jest przegub kulisty (rys. 16.1e), umożliwiający obrót członu względem każdej z trzech osi.
W mechanizmach najczęściej stosowane są pary kinematyczne klasy V (z członami o jednym stopniu swobody ruchu), rzadziej — klasy IV (z członami o dwóch stopniach swobody ruchu) oraz bardzo rzadko — klasy III (o trzech stopniach swobody ruchu).
Pary kinematyczne są łączone w zespoły, tworząc łańcuchy kinematyczne. Przykładem łańcucha kinematycznego jest układ korbowy silnika (rys. 16.2), w którym kolejne pary kinematyczne
406
Wyszukiwarka
Podobne podstrony:
Biomechanika wyklady0013 Para biokineroatyczna - to dwie kości (człony) połączone w sposób ruchomy.
skanuj0037 Połącz punkty od 1 do 52Różnice Znajdź 8 szczegółów, którymi różnią się te dwa
G wach) - części 46 I 46a, sklejamy ze sobą w ten sposób, że przesuwamy je względem siebie
37834 skanuj0009 (263) dzia zwanego ciągadłem (rys. 1.4)* Za pomocą ciągnienia otrzymuje się: druty,
Skanuj$ Połączenia kości Jości połączone są ze sobą w sposób nieruchomy lub ruchomy J połączenia nie
w przekroju poprzecznym, - warstwy elementarne są połączone ze sobą w sposób uniemożliwiający ich
więcej podobnych podstron