244 (10)
natomiast /‘"jest taką, odczytywaną z tablic (tab.V), wartością zmiennej o rozkładzie F-Snedecora, że (na ogół przyjmuje się y= 0.95). Wielkości PXj, Pyt, Px,Yt elementami bloku
(PY,X, ~ PXjYj )
wyjętego, dla każdego z punktów Zjt z macierzy
%
PZ,.Z2
A PA =
Po
z.
5.1.5. Podstawowe zastosowania
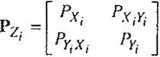
Sieci niwelacyjne w układzie (//)
Takie sieci geodezyjne znajdują zastosowanie w wielu technicznych problemach geodezji, a przy tym „generują” najprostsze, liniowe układy równań obserwacyjnych. W sieciach niwelacyjnych pomiarowi podlegają przewyższenia hjj między punktami Z(, Zj
H A

Rys. 5.1.7. Przewyższenie między dwoma punktami
Przyjmując jako parametry wysokości Hj} H: tych punktów, odpowiednie równanie obserwacyjne można przedstawić w postaci
Ponieważ prawdziwa wartość przewyższenia h- jest sumą wyniku pomiaru h-j* i nieznanej poprawki Vy, więc
Uzyskane równanie poprawki jest liniowe względem nieznanych parametrów Ht, //.. Nie ma więc potrzeby rozwijania go w szereg Taylora w otoczeniu jakichś przybliżonych wartości tych parametrów (tutaj - przybliżonych wysokości punktów). W takim przypadku wektor niewiadomych X w modelu funkcjonalnym V - AX + L tworzą „całe” wysokości punktów. Elementy macierzy A przyjmują którąś z wartości: -1, 0, 1, natomiast wyrazami wolnymi są ujemne wartości wyników pomiaru przewyższeń, tzn. lt} =~-h‘jh (w niektórych przypadkach redukowane o znane wysokości reperów, zob. przykład 5.1.1).
(5.1.48)
L--
n 10
r~ 4
/= 6
W?
-//3°
-*?
tli
-tti
-Ha
K
K
-A?
-hl
W celu ułatwienia obliczeń można jednak także przyjąć, że są znane pewne, na przykład ustalone na podstawie wyników pomiaru przewyższeń, przybliżone wysokości //t°, Hj punktów Zjt Zj (podkreślmy: ze względu na liniowy charakter funkcji /^(//y, Hj), przybliżenia te mogą być w zasadzie dowolne). Wówczas
H,=H?+dH.
245
Wyszukiwarka
Podobne podstrony:
CCF20111105�022 Tablica IV. Wartości krytyczne rozkładu F -Snedecora P{F > F(a, vi, v2)} = a_a =
103 Tablica 13 Wartości krytyczne rozkładu F na poziomie istotnościoc= 0,10 Liczba stopni swobody
rozklad chi kwadrat cz2 TABLICA 7 (cd.). Wartości krytyczne /2(a, r) rozkładu
statystyka skrypt�78 TABLICE STATYSTYCZNE Wartości krytyczne rozkładu t-Studenta Tablica I Liczbo
statystyka skrypt�80 Tablica ni Wartości krytyczne rozkładu chi-kwadrat Liczba stopni swobody, f P
Tablice statystyczne 125 Tablica 5. Wartości krytyczne rozkładu Snedecora, c.d. Pr(F > Fa) = a dl
143 Tablice statystyczne Tabela 4: Wartości krytyczne rozkładu Snedecora Pr(F > Fa) = a dla a =
144 Tablice statystyczne Tablica 4. Wartości krytyczne rozkładu Snedecora, c.d. Pr(F > Fa) = a dl
145 Tablice statystyczne Tablica 4. Wartości krytyczne rozkładu Snedecora, c.d. Pr(F > Fa) = a dl
CCF20111105�017 Tablica II. Wartości krytyczne rozkładu t-Studenta Poziom istotności dla testu
CCF20111105�018 Tablica III. Wartości krytyczne rozkładu chi-kwadrat P{/ > /(a, v)} =
CCF20111105�029 Tablica VI. Wartości krytyczne rozkładu D P{D>D(a,n)} =
CCF20111105�030 Tablica VII. Wartości krytyczne rozkładu D P{D>D(a,n)} = a przy nieznanych parame
CCF20111105�033 Tablica IX. Wartości krytyczne rozkładu liczby znaków n test
więcej podobnych podstron