51
51
Moduł impulsowy, zestyk przelotowy
Informacja
Zestyki przelotowe, wykorzystywane w technice sterowania, przetwarzają sygnał ciągły w sygnał impulsowy. Zestyki przelotowe przekaźnika charakteryzują się tym, że przy włączaniu lub wyłączaniu przekaźnika zamykają się na chwilę, wytwarzając sygnał impulsowy.
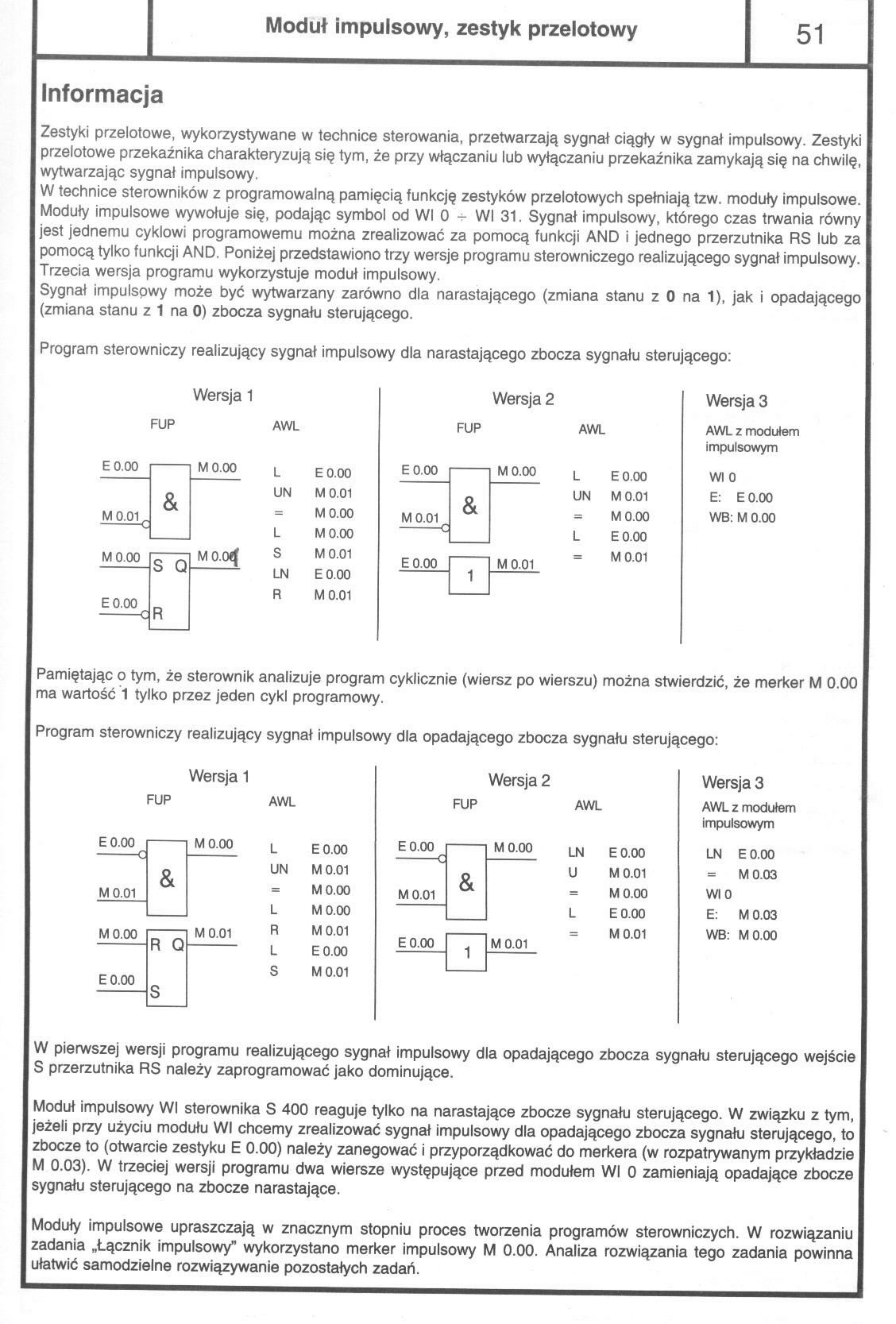
W technice sterowników z programowalną pamięcią funkcję zestyków przelotowych spełniają tzw. moduły impulsowe. Moduły impulsowe wywołuje się, podając symbol od Wl 0 -r Wl 31. Sygnał impulsowy, którego czas trwania równy jest jednemu cyklowi programowemu można zrealizować za pomocą funkcji AND i jednego przerzutnika RS lub za pomocą tylko funkcji AND. Poniżej przedstawiono trzy wersje programu sterowniczego realizującego sygnał impulsowy. Trzecia wersja programu wykorzystuje moduł impulsowy.
Sygnał impulspwy może być wytwarzany zarówno dla narastającego (zmiana stanu z 0 na 1), jak i opadającego (zmiana stanu z 1 na 0) zbocza sygnału sterującego.
Program sterowniczy realizujący sygnał impulsowy dla narastającego zbocza sygnału sterującego:
Wersja 1
Wersja 2
Wersja 3
FUP
FUP
AWL
|
E 0.00 |
M 0.00 l E 0.00 |
E 0.00 | |
|
O |
UN M 0.01 | ||
|
M 0.01 „ |
& |
= M 0.00 |
M 0.01 |
|
-c |
L M 0.00 |
-C | |
|
M 0.00 |
M 0.0«f s M 0 01 |
E 0.00 |
E 0.00
M 0.01
M 0.00
&
M 0.01
AWL
L E 0.00
UN M 0.01
= M 0.00
L E 0.00
= M 0.01
AWL z modułem impulsowym
Wl 0
E: E 0.00
WB: M 0.00
cR
Pamiętając o tym, że sterownik analizuje program cyklicznie (wiersz po wierszu) można stwierdzić, że merker M 0.00 ma wartość 1 tylko przez jeden cykl programowy.
Program sterowniczy realizujący sygnał impulsowy dla opadającego zbocza sygnału sterującego:
Wersja 1
FUP AWL
|
E 0.00 |
& |
M 0.00 |_ E 0.00 |
|
M 0.01 |
UN M 0.01 = M 0.00 L M 0.00 | |
|
M 0.00 |
M 0.01 R M 0 01 | |
|
R Q S | ||
|
E 0.00 |
L E 0.00 S M 0.01 | |
Wersja 2
FUP AWL

|
LN |
E 0.00 |
|
U |
M 0.01 |
|
= |
M 0.00 |
|
L |
E 0.00 |
|
= |
M 0.01 |
Wersja 3
AWL z modułem impulsowym
LN E 0.00 = M 0.03 WIO
E: M 0.03
WB: M 0.00
W pierwszej wersji programu realizującego sygnał impulsowy dla opadającego zbocza sygnału sterującego wejście S przerzutnika RS należy zaprogramować jako dominujące.
Moduł impulsowy Wl sterownika S 400 reaguje tylko na narastające zbocze sygnału sterującego. W związku z tym, jeżeli przy użyciu modułu Wl chcemy zrealizować sygnał impulsowy dla opadającego zbocza sygnału sterującego, to zbocze to (otwarcie zestyku E 0.00) należy zanegować i przyporządkować do merkera (w rozpatrywanym przykładzie M 0.03). W trzeciej wersji programu dwa wiersze występujące przed modułem Wl 0 zamieniają opadające zbocze sygnału sterującego na zbocze narastające.
Moduły impulsowe upraszczają w znacznym stopniu proces tworzenia programów sterowniczych. W rozwiązaniu zadania „Łącznik impulsowy” wykorzystano merker impulsowy M 0.00. Analiza rozwiązania tego zadania powinna ułatwić samodzielne rozwiązywanie pozostałych zadań.
Wyszukiwarka
Podobne podstrony:
Przełomowe rozwiązania techniczne stanowiące podstawę przemysłuczwartej generacjiPRZEMYSŁ CZWARTEJ
SDC13036 Prądnice tachometryczne prądu przemiennego nie są wykorzystywane w serwomechanizmach sterow
a INNOWACYJNA GOSPODARKA n Janami Jędrzeja i BydgoszczyCelem ogólnym projektu jest wykorzystanie tec
WYKORZYSTANIE TECHNIK MULTIMEDIALNYCH I GRAFIKI 3D DO NAUCZANIA ANATOMII Piotr RZĄD Katedra i Zakład
umiejętności aktywnego słuchania B. U12. wykorzystuje techniki komunikacji werbalnej, niewerbalnej
Oczekuje się również, że w wyniku wykorzystania techniki cyfrowej skutkującego zwielokrotnieniem lic
wykorzystaniu techniki modulacji (PWM). W zależności od znaku różnicy napięć wyjściowego falownika i
więcej podobnych podstron