53 (123)

|
Wykaz elementów |
Pozostałe | ||
|
Płyta główna |
JP1............. |
... goldpin — 1x5 | |
|
Rezystory |
JP2.JP5.JP11 ,JP16. |
... goldpin - 1x3 | |
|
R1.R6........... |
. ,1kQSMD 0805 |
JP3 (Zas. serwa) ... |
... goldpin - 1x2 |
|
R2.............. |
...........5kQ |
JP4 (AVR ISP) .... |
... goldpin 2x5 |
|
R3.............. |
..........50n |
JP6............. |
... goldpin-1x6 |
|
R4.R7-R9......... |
,330Q SMD 0805 |
JP7.JP15......... |
... goldpin-2x5 |
|
Kondensatory |
JP8(Zas. silnika) ... |
... goldpin-1x2 | |
|
C1,C2,C7,C8, C12-C15,C17,C24,C25 |
JP9.JP10......... |
... goldpin-1x4 | |
|
10OnF SMD 0805 |
JP12 (SUPPLY) .... |
... goldpin-1x2 | |
|
C3,C4........... |
......... 1OOnF |
JP13 (SW)........ |
... goldpin-1x2 |
|
C5,C8,C16,C18,C28 |
.........10OąF |
JP14 (l2C)........ |
... godlpin — 1x2 |
|
C9.C13.......... |
. 27pF SMD 0805 |
JP17 (RS232)..... |
... goldpin - 1x3 |
|
C11............. |
...........1.uF |
JP18 (RS zworka).. |
... goldpin -2x2 |
|
Półprzewodniki |
L1.............. |
____dławik lOpH | |
|
LED1 (Power)...... |
......LED 3mm |
Q1.............. |
. 4-16MHz lub brak |
|
LED2 (Kontrolka)... |
......LED 3mm |
RESET........... |
microswitch 5mm |
|
LED3 (RXD kontrolka) |
LED 3mm |
S PB2........... |
mircoswitch 5mm |
|
LED4 (TXD kontrolka) |
LED 3mm |
Sterownik silników | |
|
IC1 ............. |
......... L7805 |
D1-D8........... |
........1N5819 |
|
IC2...........MAX202/232 S016L |
IC1 .... L298 MULTIWATT-15 DUAL | ||
|
IC3............. |
......ATmega32 |
FULL-BRIDGE DRIVER | |
|
IC4.............f |
3CF8574T S016W |
S1,S2......ztącza 1x2 np. typu ARK | |
|
U1.............. |
......2X16 LCD |
SV1............. |
.....goldpin 2x5 |
Na płytce głównej znajdują się dwa złącza do czujników analogowych np. do dalmierzy SHARP. Inne czujniki można podłączyć do pozostałych portów.
Mechanika
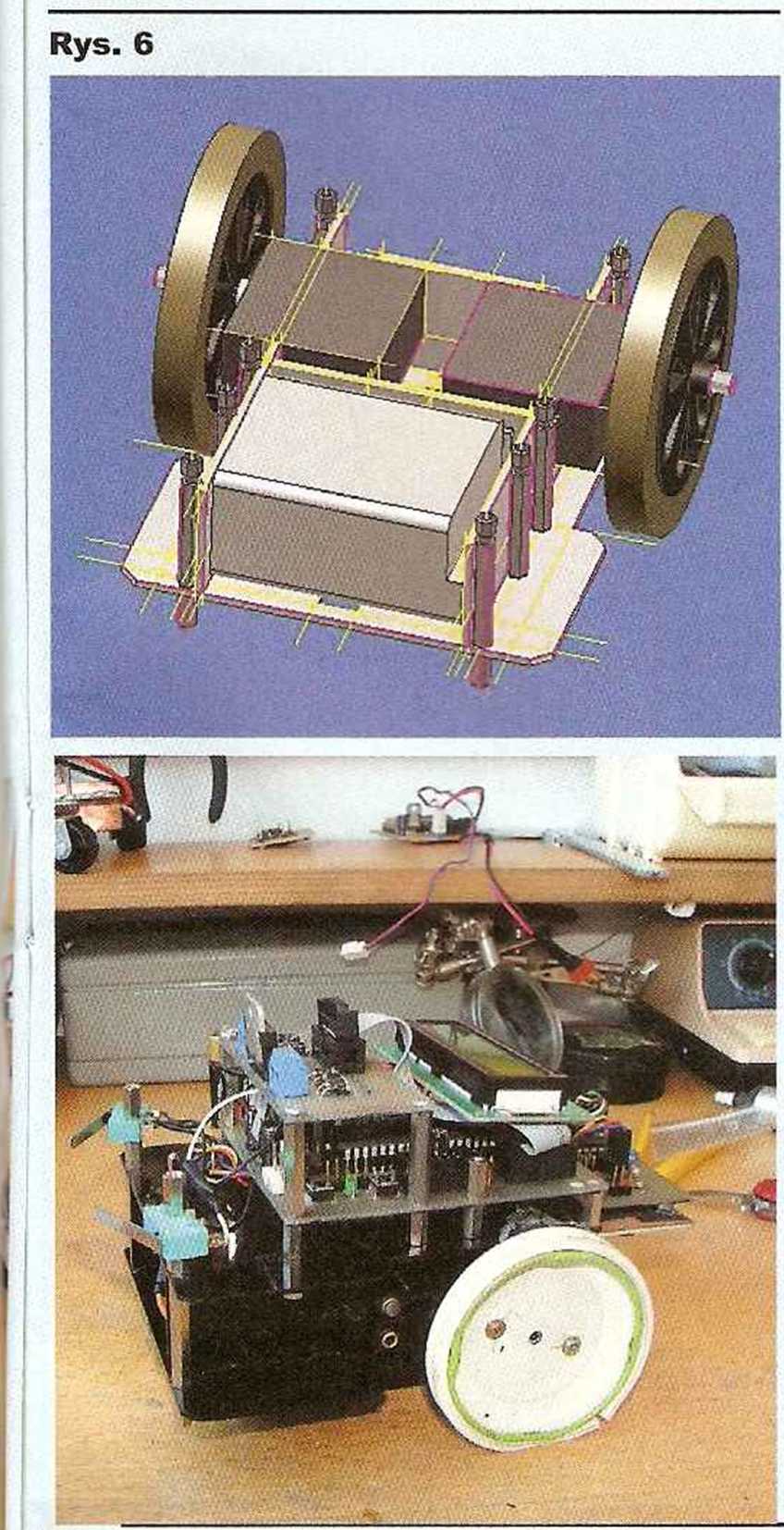
Konstrukcja robota wykonana jest z laminatu dwustronnego pokrytego czarnym sprayem szybkoschnącym. Projekt mechaniki został wykonany w Corelu, ale można go również wykonać w dowolnym innym programie graficznym. Można też zaprojektować sobie robota w programach CAD, ja naszkicowałem później konstrukcję w Autodesk Inventor (screeny projektu widoczne są na rysunkach 5 i 6). Następnie projekt wydrukowałem na papierze samoprzylepnym, który później nakleiłem na laminat. Wzorując się na liniach projektu wydrukowanego na papierze wyciąłem laminat najpierw małą wiertarką z tarczą tnącą, a następnie już dokładniej doszlifowałem całość pilnikiem. (Jeśli ktoś nie dysponuje akurat papierem samoprzylepnym, a robi sam płytki drukowane, może również wydrukować projekt na papierze termo transferowym, a następnie przeprasować go na płytkę, tak samo jak wzory ścieżek.) W ramie robota w odpowiednich miejscach są otwory na metalowe łączniki oraz na dwa serwomechanizmy modelarskie, napędzające całą konstrukcję. Prócz boków konstrukcji, do których przykręcane są silniki, wszystkie inne elementy są przykręcane na metalowych dystansach do płytek. Na etapie projektowania warto też zaplanować miejsca na otwory, przez które przechodzić będą przewody, u mnie są to 4 niewielkie prostokątne otwory. Tak jak wspomniałem, napędem całości są dwa przerobione na pełny obrót serwomechanizmy modelarskie, nie miałem pod ręką żadnego ciekawego materiału na koła, więc wykorzystałem zakrętki od słoików, na które nakleiłem później gumową uszczelkę do okien o profilu E. Jako trzeci punkt podporu wykorzystałem kulę umieszczoną w łożysku, można to znaleźć w; każdym markecie budowlanym.
Program
Cały urok tej konstrukcji polega na tym, że każdy, kto choć trochę potrafi programować, może sam napisać dowmlny program. Ja piszę programy w BASCOM—ie, jest to język bardzo łatwy, więc każdy na podstawie schematu konstrukcji bez problemu powdnien napisać program dla robota.
Możliwości rozbudowy
Właśnie łatwość rozbudowy miała być głównym atutem tej konstrukcji. Do zwiększenia możliwości pojazdu można wykorzystać wolne porty I/O mikrokontrolera oraz RS232 i interfejs I2C. Ja nie dobudowywałem jeszcze żadnych specjalnie skomplikowanych układów, dodałem tylko enkodery - szybko przerobiony układ z czujnikami linii. W planach mam dobudowanie czujnika z komputerowej myszki optycznej, który miałby informować o realnym przesunięciu konstrukcji oraz dodanie skanera 2D opartego na 2 micro-serwach i 2 czujnikach optycznych Sharpa.
Damian Szymański
www.dioda.com.pl treker@dioda.com.pl

Elektronika dla Wszystkich Styczeń2010
i
Wyszukiwarka
Podobne podstrony:
Image 05a VI. WYKAZ ELEMENTÓW ELEKTRYCZNYCH Płytka główna wg rys. 4573-554-1 (2217-482
Elementy komputera - Płyta główna PŁYTA GŁÓWNA - (ang. mainboard lub motherboard) stanowi najważniej
Aktualny slajd (2 z 31) Notatki Elementy komputera - Płyta główna Następny slajd PŁYTA GŁÓWNA - (ang
Elementy komputera - płyta główna Płyta główna jest podstawowym komponentem komputera. Stanowi podst
Płyta główna - gniazda procesora Przykład rozmieszczenia elementów na płycie głównej W tym przypadku
Płyta główna - gniazda procesora Rysunek 2.4. Przykład rozmieszczania elementów na płycie głównej W
Image 16 Rys. 4: Rozmieszczenie i widok ogólny elementów mechanicznychVIII. WYKAZ ELEMENTÓW
Slajd26 (144) WYKAZ ELEMENTÓW TTL DO PRZESTUDIOWANIA -
plyta2 Płyta główna/
Fałszowanie sprawozdań finansowych a odpowiedzialność zarządu za zobowiązania... 123 Ważnym elemente
P1000107 (2) Standard YXI ■ modułowe systemy pomiarowe: kaseta, płyta główna i&nbs
s571 Zarządzanie mdrem systemu 571 Zarządzanie mdrem systemu 571 Najważniejsze elementy pozostają ta
więcej podobnych podstron