HPIM0807
S ShMtMOHH* lohfttltW'
S ShMtMOHH* lohfttltW'
i wwśnioj ustalonych grup nazw. Większość sterowników umożliwia uźyik
m
w programie. 1 może być traktowana Jlko podprogram, który jest wy^. wanyjeden lub więeąj rwy |hhIc/«s wykonywaniu programu. Podprogram hyć wykonywany albo prac/ iKl^inkj/icnic prowadzące do niego, albo pr^0** stowanic sygnałów wejściowych dla tozgnłęiicnin. l.ie/ba zasad podejmąC* decyzji imienia się w zależności od rodzaju sterowania. Jednak większość 1,1 i\>wart umożliwia idenłyllkmyę lub o/nac/anic podprogramów za pomooąj^
tukowi określenie czy sygnał powinien przerwać aktualnie wykonywana programu* czy czekać dopóki wykonywanie tej gałęzi się nie zakończy, imść preeiywania jest wykorzystywana głównie w gałęziach błędów. Galą* u ' dów jest wywoływana, gdy sygnał wejściowy wskazuje, że nastąpiło nicnorn^j ne d/iałanie (np. niebezpieczne warunki eksploatacji). W zależności od przyp,^' ku i projektu gałęzi robot albo podejmie działania korygujące, albo przemy ruch i prześle sygnał do operatora.
Rozgałęzienia sij często stosowane, gdy robot jest programowany do \Vv konania więcej niż jednego zadania. W tym przypadku oddzielne gałęzie są $t0 sowanc do każdego, pojedynczego zadania. Żeby umożliwić sterowanie tyj zadaniami, muszą być zastosowane odpowiednio sygnały. Powszechnie wyu rzystuje się do tego celu zewnętrzne sygnały pochodzące od czujników i innych urządzeń.
Hardziej złożone wymagania rozgałęzienia programu mogą być - i zwykle są I sprowadzane do sekwencji prostych rozgałęzień.
5.2. Klasyfikacja układów sterowania
Różnorodność zadań spełnianych czy wymaganych do spełnienia przez układy sterowania robotów wskazuje na dużą różnorodność rozwiązań systemowych i technicznych tych układów.
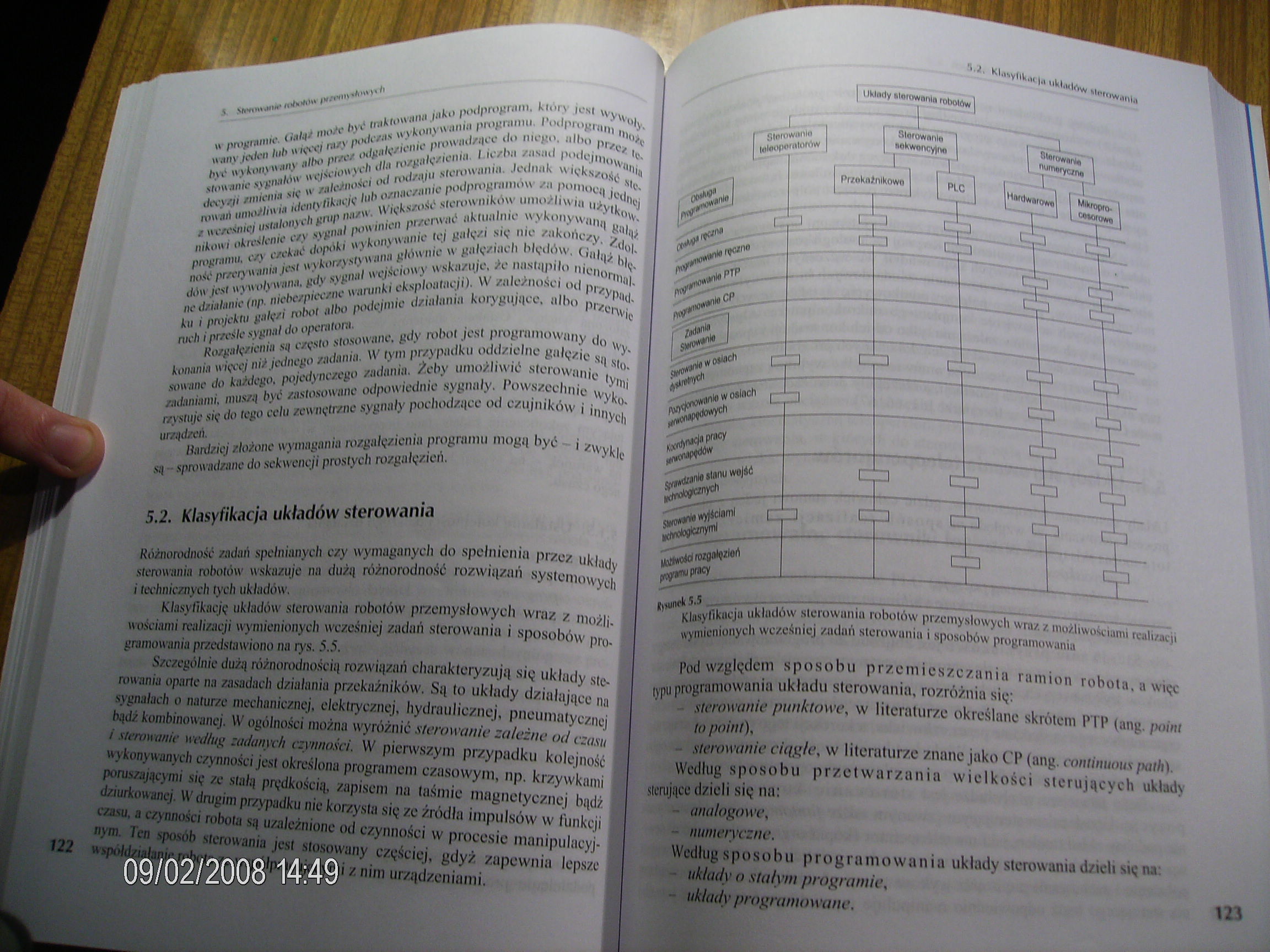
Klasyfikację układów sterowania robotów przemysłowych wraz z możliwościami realizacji wymienionych wcześniej zadań sterowania i sposobów programowania przedstawiono na rys. S.S.
Szczególnie dużą różnorodnością rozwiązań charakteryzują się układy sterowania oparte na zasadach działania przekaźników. Są to układy działające na sygnałach o naturze mechanicznej, elektrycznej, hydraulicznej, pneumatycznej bądź kombinowanej. W ogólności można wyróżnić sterowanie zależne od czasu i sterowanie według zadanych czynności. W pierwszym przypadku kolejność wykonywanych czynności jest określona programem czasowym, np. krzywkami poruszającymi się ze stałą prędkością, zapisem na taśmie magnetycznej bądź dziurkowanej. W drugim przypadku nie korzysta się zc źródła impulsów w funkcji czasu, a czynności robota są uzależnione od czynności w procesie manipulacyjnym. Ten sposób sterowania jest stosowany częściej, gdyż zapewnia lepsze
urzndzonitimi.1
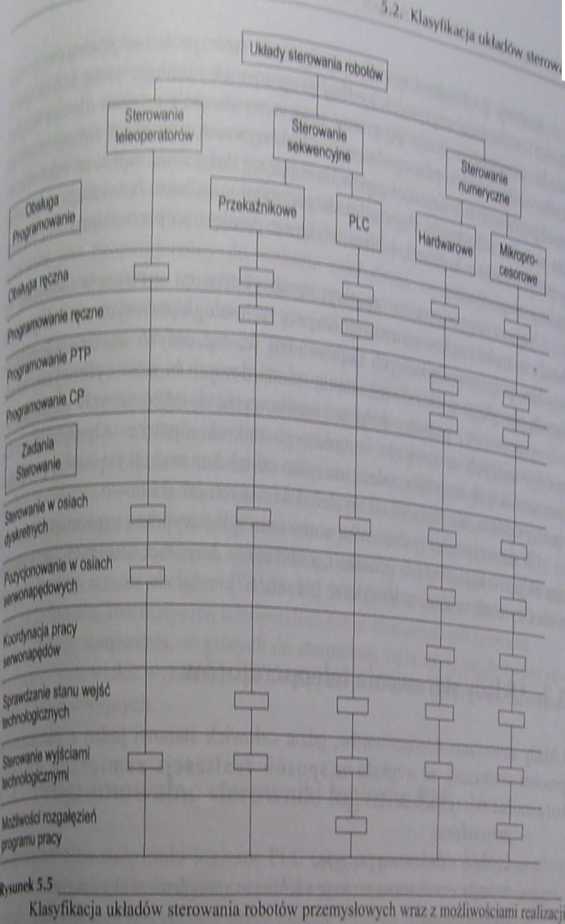
wymienionych wcześniej zadań sterowuniu i sposobów programowania
Pod względem sposobu przemieszczania ramion robota, a więc typu programowania układu sterowania, rozróżnia się:
- stemmie punktowe, w literaturze określane skrótem PTP (ang. point to point),
- sterowanie ciągle, w literaturze znane jako CP (ang. comimmpatii). Według sposobu przetwarzania wielkości sterujących układy
sterujące dzieli się na:
I analogowe,
- numeryczne.
Według sposobu programowania układy sterowania d/icłi się na
- układy o stałym programie,
- układy programowane.
Wyszukiwarka
Podobne podstrony:
Krzysztof Lipecki, Dominik Ziarkowski ustalono, że zdecydowana większość studentów obydwu uczelni (7
Akceptacja obecności poszczególnych grup imigrantów Większą tolerancję dla obecności imigrantów w
DSCN5273 (3) LICZBA GRUP A WIELKOŚĆ KONFORMIZMU: Im więcej grup tym większy konformizm, np 2 grupy p
Ustalono więc następujący sposób konstrukcji symboli grup taryfowych: litera ABC oznacza grupę taryf
skanuj0022 (222) 12. Dla ustalonych bezspornie punktów granicznych wykonano w obecności stron stabil
więcej podobnych podstron