1109145233
17
Zadanie 3:
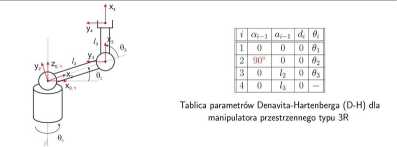
Dla manipulatora przestrzennego typu 3R (rys.4) należy: związać z każdym członem układ współrzędnych i przedstawić na rysunku. Podać w tabeli parametry D-H i obliczyć macierze jednorodne '-IT, a następnie rozwiązać proste zadanie kinematyki dla tego manipulatora i obliczyć położenie i orientację układu {4} w układzie bazowym.
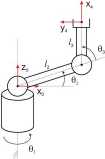
Rys. 4: Manipulator przestrzenny 3R
18
Rozwiązanie:
Korzystając z wzoru na macierz przejścia j *T obliczamy
|
Cl |
-Si |
0 0 |
c2 |
-S2 |
0 |
dl |
C3 |
—83 |
0 k |
1 0 0 |
k | |||
|
Si |
Cl |
0 0 |
\t = |
0 |
0 |
-1 |
0 |
l T = |
S3 |
C3 |
0 0 |
3ĄT = |
0 1 0 |
0 |
|
0 |
0 |
1 0 |
S2 |
C2 |
0 |
0 |
0 |
0 |
1 0 |
0 0 1 |
0 | |||
|
0 |
0 |
0 1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 1 |
0 0 0 |
1 |
Rozwiązaniem prostego zadania kinematyki jest macierz
Wyszukiwarka
Podobne podstrony:
17 Zadanie 3: Dla manipulatora przestrzennego typu 3R (rys.4) należy: związać z każdym członem układ
17 Zadanie 3: Dla manipulatora przestrzennego typu 3R (rys.4) należy: związać z każdym członem układ
17 Zadanie 3: Dla manipulatora przestrzennego typu 3R (rys.4) należy: związać z każdym członem układ
Zadanie 5 Dla grup przestrzennych P42/m, P62, P62 i Pó^/m podać współrzędne pozycji symetrycznie
17 Zadania i ogólna budowa układów konstrukcyjnych podwozia Rys. 1.16 Zawieszenie samochodu osoboweg
schemat połaczen 1 Rys. 17: Schemat montażowy wzmacniacza stereofonicznego typu
krzywki ?ne do zadania 1. Dla przedmiotu widocznego na rys. 8.10 zaprojektować krzywkę K3 dla nastę
Zadanie 2.2 Dla podanego schematu statycznego znaleźó moment zginający metodą kinematyczną (rys.
Zadanie 4 Dla kilku wybranych grup przestrzennych przedstawiono poniżej rozmieszczenie elementów sym
skanowanie0008 17 Zadanie 2. Systematyka fenetyczna, zwana też numeryczną opiera się na liczbie cech
skanowanie0008 17 Zadanie 2. Systematyka fenetyczna, zwana też numeryczną opiera się na liczbie cech
koło PP str 2 4. Dla danego przestrzennego manipulatora proszę: a) określić ruchli
Łatwe: wybierz krzyżówkę (strona 1/4) B Lubię to! 17
więcej podobnych podstron