6355786438
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne
Zasadą pracy ustalonej maszyny synchronicznej jest ruch synchroniczny pola twomika &„ i pola wzbudnika ©f - ruch synchroniczny obu pól oznacza, że pola są nieruchome względem siebie. Wzajemne położenie pól (wektorów pól) zależy od charakteru pracy MS (prądnica lub silnik) oraz od charakteru obciążenia (czynne, czynno-indukcyjne, czynno-pojemnościowe).
Ruch synchroniczny jest warunkiem generacji użytecznej mocv elektrycznej - użytecznego momentu elektromagnetycznego.
Prędkość obrotowa wirnika określa częstotliwość napięcia na zaciskach twomika: pOrm
60
gdzie:
fim - prędkość kątowa mechaniczna wirnika (prędkość synchroniczna) [rad/s]; ns - prędkość obrotowa mechaniczna wirnika (prędkość synchroniczna) [obr/min]; p - liczba par biegunów.
Zależność na SEM indukowaną w uzwojeniu twomika MS jest analogiczna do zależności na SEM dla transformatora (z pominięciem współczynnika kua):
E0 = 4,44 O f/e za kua (1.3)
gdzie:
za - liczba zwojów na fazę uzwojenia twomika; k„„ - współczynnik uzwojenia twomika.
Uwaga:
SEM rotacji E0 jest wielkością elektromechaniczną - jest efektem obrotowego mchu mechanicznego (prędkość fi-,,,) pola wzbudnika 0/ (wzbudzanego prądem Ij).
_/,. - częstotliwość SEM E0 określa rów. (1.1) lub (1.2)._
Statyczne stany pracy MS o wirniku cylindrycznym (turbogeneratora) można opisać za pomocą modelu obwodowego przedstawionego na rys. 1.4. SEM rotacji Eg reprezentuje sterowane źródła napięcia
oznaczone symbolem natomiast napięcie f/„jest napięciem fazowym na zaciskach maszyny w stanie
obciążenia (prąd twomika I„ 0). Straty w uzwojeniu twomika i zjawisko oddziaływania twomika odwzorowują odpowiednio rezystancja R„ oraz reaktancja synchroniczna-^. Ze względu na relację Ra«Xs pomija się rezystancję R„ w modelu obwodowym MS.
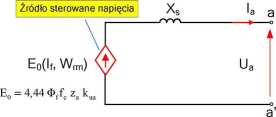
Rys. 1.4. Podstawowy model obwodowy (schemat zastępczy) maszyny synchronicznej o wirniku cylindrycznym (turbogeneratora) - strzalkowanie napięć prądów dla pracy prądnicowej
Wyszukiwarka
Podobne podstrony:
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne 10 kształt. 4. Wykreślić
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne ĆWICZENIE (PS)MASZYNY SYNCHRONICZNEBADANIE
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne 3 wirnika (wzbudnika), odpowiednio/oraz f.
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne 6 Rys. 2.1. Charakterystyka biegu jałowego
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne 7 Tablica 3 Pomiar charakterystyki biegu
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne Uu Uv Uw Rys. 2.4. Schemat połączeń prądni
M. Ronkowski, G. Kostro, M. Michna: Maszyny synchroniczne 9 Rys. 2.5. Schemat połączeń prądnicy
M. Ronkowski, G. Koslro, M. Michna: Maszyny synchroniczne 5 2. BADANIA 2.1. Oględziny zewnętrzne Nal
12 M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA „ręczne” oszacowanie wartości udarowych i ustalon
12 M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA „ręczne” oszacowanie wartości udarowych i ustalon
12 M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA „ręczne” oszacowanie wartości udarowych i ustalon
M. Ronkowski, M. Kamiński, G. Kostro, M. Michna 15 Reaktancja synchroniczna podprzejściowa X"(j
10 M. RONKOWSKl, M. KAMIŃSKI, G. KOSTRO, M. MICHNA Uwzględniając iap = eap I(Ra + Ra) oraz eap = Gaf
M. RONKOWSKl, M. KAMIŃSKI, G. KOSTRO, M. MICHNAĆWICZENIE SILNIKI PRĄDU STAŁEGO BADANIE CHARAKTERYSTY
M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA • załączeniu skokowym stałego
więcej podobnych podstron