Akademia Techniczno-Humanistyczna
w Bielsku-Białej
Laboratorium Automatyki i Sterowania
Temat ćwiczenia:
Badanie regulatorów typu P ; PI ; PID .
Składgrupy:
Baron Adam
Bułka Sławomir
Cader Maciej
Czech Grzegorz
Ogiegło Andrzej
Panek Marcin
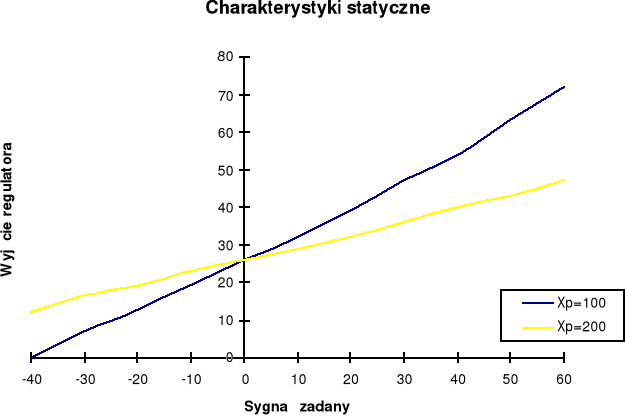
Regulator P
- charakterystyki statyczne
dlaXp=0 dlaXp=100
Sygnał zadany |
Wyjście regulatora |
|
Sygnał zadany |
Wyjście regulatora |
kPa |
kPa |
|
kPa |
kPa |
20 |
21 |
|
-40 |
0 |
30 |
25,5 |
|
-30 |
7 |
40 |
40 |
|
-20 |
12,5 |
50 |
48 |
|
-10 |
19,5 |
60 |
58 |
|
0 |
26 |
70 |
66 |
|
10 |
32 |
80 |
76 |
|
20 |
39 |
90 |
83 |
|
30 |
47 |
100 |
89 |
|
40 |
54 |
50 |
63 |
|||
60 |
72 |
dlaXp=200
Sygnał zadany |
Wyjście regulatora |
kPa |
kPa |
-40 |
12 |
-30 |
16,5 |
-20 |
19 |
-10 |
23 |
0 |
26 |
10 |
29 |
20 |
32 |
30 |
36 |
40 |
40 |
50 |
43 |
60 |
47 |
Analiza charakterystyk skokowych regulatora typu P została pokazana na załączniku. Wyznaczone Xp dla wartości 50%, 100%, 200% :
dla ustawionych 50% otrzymaliśmy z wykresu 45,8 %.
dla ustawionych 100% otrzymaliśmy z wykresu 116,6 %.
dla ustawionych 200% otrzymaliśmy z wykresu 187,5 %.
Regulator PI
Porównanie zadanego czasu zdwojenia Ti z czasem zdwojenia
odczytanym z wykresów na rolce :
(prędkość posuwu taśmy 1mm/s)
Wartość zadana |
0,2 min |
0,5 min |
1 min |
Wartość odczytana |
0,21 min |
0,56 min |
1,46 min |
3.) Regulator PID
W regulatorze tym do analizy bierzemy jeszcze pod uwagę czas
wyprzedzenia Td
|
Wartości zadane [w min] |
Wartości odczytane [w min] |
1. |
T d =0,06 T i =0,5 |
T d =0,03 T i =0,86 |
2. |
T d =0,1 T i =0,5 |
T d =0,03 T i =0,76 |
3. |
T d =0,5 T i =0,5 |
T d =0,03 T i =0,88 |
4. |
T d =1 T i =0,5 |
T d =0,11 T i =0,81 |
Z wartości odczytanych z wykresów z rolki otrzymujemy
![]()
następujące wartości stosunku :
![]()
dla 1.
![]()
dla 2.
![]()
dla 3.
![]()
dla 4.
4.) Wnioski :
błędy w wynikach odczytywanych spowodowanie są niedokładnością przyrządów pomiarowych (grubość pisaków manometru, skala linijki), oraz samego regulatora.
im większa wartość zadana Xp tym mniejszy skok wartości otrzymanej na wykresie
w regulatorze PI dla mniejszego czasu zdwojenia większa jest stromość narastania zbocza przebiegu rysowanego przez rejestrator
w regulatorze PID zadajemy również czas opóżnienia oprócz czasu zdwojena , wynika to stąd że regulator ma dwa człony tzn. różniczkujący i całkujący
![]()
![]()
![]()
![]()
![]()