1947995058
13
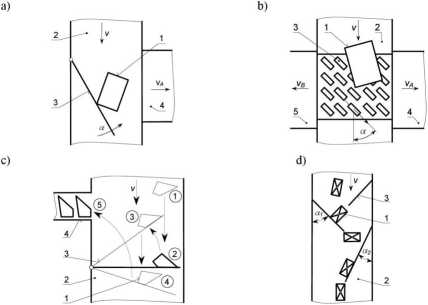
Rys. 2.4. Pizy kładowe struktury kinematyczne stacjonarnych manipulatorów bezchwy takowy c h realizujących: a) i b) proces sortowania, c) i d) proces pozycjonowania: a) i c) manipulator z zastawą aktywną [3, 4, 31, 43, 44, 131], b) manipulator z krążkami skrętnymi [7, 16, 17,65,68,127], d) manipulator z układem zastaw pasywnych [14,15. 94]: 1 - ładunek. 2 - przenośnik główny, 3 - człon roboczy. 4 i 5 - przenośniki odbiorcze. v - prędkość liniowa przenośnika głównego. vA i vB - prędkości liniowe przenośników odbiorczych
a)
b)
c)
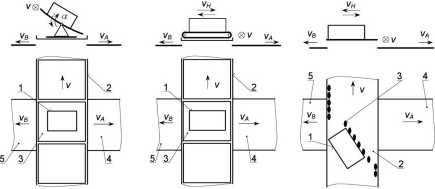
Rys. 2.5. Przy kładowe struktury kinematyczne potokowych manipulatorów bezchwytakowych realizujących proces sortowania: a) tackowy wychylowy [25, 154], b) tackowy przenośnikowy [22, 137], c) zabierakowy [25, 156]: 1 - ładunek. 2 - przenośnik główny, 3 - człon roboczy. 4 i 5 - przenośniki odbiorcze. v - prędkość liniowa przenośnika głównego, vH - prędkość liniowa elementu wykonawczego, vA i vB - prędkości liniowe przenośników odbiorczyeh
Pojawienie się w budowie maszyn układów mechanicznych wykraczających poza klasyczne pojęcie manipulatora z chwy takiem poszerza dotychczasową klasyfikację maszy n
Wyszukiwarka
Podobne podstrony:
Istotną cechą manipulatorów bezchwy takowych jest to, że nie mają one szczególnych ograniczeń co do
Robot przemysłowy Struktury kinematyczne manipulatorów przemysłowych Do opisu ruchu manipulatorów
więcej podobnych podstron