1318344978
MANIPULATOR DLA OSOBY PO CZĘŚCIOWEJ AMPUTACJI KOŃCZYNY GÓRNEJ
Autorka: inż. Karolina Karolak (2016/2017), Mechatronika Promotor: dr inż. Ludomir Jankowski
Politechnika
Wrocławska
Wydział Mechaniczny Politechniki Wrocławskiej
Cel pracy - opracowanie wstępnego projektu układu mechanicznego manipulatora dla osoby po częściowej
amputacji górnej kończyny (poniżej stawu łokciowego).
Schemat kinematyczny
7 członów. 6 par obrotowych, zginane palce, przestawny kciuk

Założenia projektowe
- proteza transradialna
- mechanizm wysuwu - 120 mm,
- wielokrotny obrót chwytaka o 360*.
- chwyty cylindryczny, hakowy, lateralny. kleszczowy.
- pomiar obiektów manipulowanych 5-100 mm.
- maksymalna masa obMdu manipulowanego: 500 o.
- przeznaczenie praca na stanowisku przemysłowym
•<**»*•>«* wy**-'
tosterrenia pcii wky
Pomw
SoboUktt^o w mkuak. 2016/2017 na Wypnale MecWamanym
negrode / słopme
Protezomanipulator przemysłowy
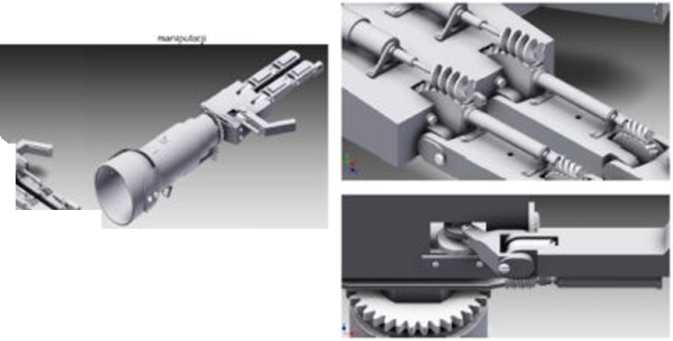
1. Chwytak: 3. Sterowanie
• trójpatczasty • mieszane - ruchy ciała i nacisk mięśni
• chwyt sitowy • zaprogramowane chwyty
2. Zamocowanie protezy • złącze obrotowe
• podwieszenie
Napędy: palców (u góry) I kciuka (u dołu)
• lei protetyczny 37 Ootowpofelu Komun SMP Pr*c Dyplomowych mt. Pro*
Wyszukiwarka
Podobne podstrony:
IMG987 (2) rofilaktyka pockspozycyjna HIVInformacja dla osoby po ekspozycji o: • r
30 3 Naczynia i nerwy części wolnej kończyny górnej, miednica 41 A ‘1 *2 3 A *T 5 6 17 4.31
udar mózgu1 Wybrane ćwiczenia wspomagające powrót funkcji kończyny górnej po udarze mózgu.
76325 tomI (313) Badanii- pacjenta dla potrzlb fizjoterapii 315 Testy drożności naczyń kończyny górn
kier PIELEGNIARSTWO co po lacinie z polaczen k gornej kier* PIELĘGNIARSTWO Połączenia kończyny g
strona (17) dużo i taki wynik terapeutyczny wymaga wielkiego wkładu pracy (dla kończyny górnej — p.
0000024(1) 2 248 KlNEZ)TERAPfA Ryc. 182 Stopień 3 Pozycja kończyny górnej po wykonaniu ruchu. Ryc. 1
0000032 2 264 Ryc 209 Stopień 3 Ustawienie Kończyny górnej po wykonaniu ruchu ___ KIM/MERApĄ Ryc. 21
0000044(1) 2 Ryc. 258. Kość ramienna i bliższe części kości przedramienia prawej kończyny górnej wid
MusclesOfTheAnteriorChestAndArm copy MUSCLES OF THE ANTERIOR CHEST AND ARM MIĘSNIE CZĘŚCI PRZEDNIEJ
DSC00169(2) Porażenie kurczowe połowicze (hemiplegia) dotyczy kończyny górnej i dolnej po tej samej
więcej podobnych podstron